Linux Mint 운영 체제의 최신 버전은 여기에 있습니다. 잠시 동안 고민하고 있습니다.
Linux Mint 19 "Tara" 는 Ubuntu 18.04를 기반으로 한 장기간의 지원 릴리스로, 2023 년까지 공식적인 지원을받을 예정입니다.
그러나 확장 된 지원은 리눅스 민트 19를 이전 제품들과 차별화시키는 것들 중 하나 일 뿐이다. 운영 체제에는 업데이트 된 Software Manager 및 Update Manager, 높은 픽셀 밀도를 특징으로하는 디스플레이가있는 컴퓨터에 대한 향상된 지원 및 문제가 발생할 경우 컴퓨터를 이전 상태로 쉽게 복원 할 수있는 Timeshift라는 기능이 있습니다.
Linux Mint 19는 Cinnamon, MATE 또는 Xfce 데스크탑 환경 중 하나를 선택 하여 다운로드 할 수 있습니다. 이번에는 공식 KDE 옵션이 없습니다.
가장 큰 변화는 전혀 새로운 것이 아닙니다 . Timeshift 는 Linux Mint 18.3에서 처음 소개되었으며 이전 버전의 운영 체제에서 사용할 수 있습니다. 그러나 이제는 운영 체제에 더욱 밀접하게 통합되었습니다.
시간 이동은 기본적으로 운영 체제의 스냅 샷을 만들어 OS 또는 패키지 업데이트로 인해 작동이 멈추는 경우 특정 문제를 해결하거나 이전 스냅 샷에서 복원하도록 선택할 수 있습니다. Windows에서 시스템 복원 지점을 사용하는 것과 같습니다.
Timeshift는 업데이트로 인해 시스템이 손상 될 위험을 최소화하므로 Linux Mint의 Update Manager 를 사용하면 자동 업데이트를보다 쉽게 사용할 수 있습니다. 이전에는 고급 사용자를위한 기능이었습니다. 그러나 이제는 백업에서 쉽게 복원 할 수 있으므로 자동 업데이트와 관련된 위험이 줄어 듭니다.
Timeshift가 구성되어 있지 않음을 감지하면 Update Manager에 경고가 표시됩니다.
Linux Mint Software Manager 는 업데이트 된 레이아웃과 사용자 인터페이스, 빠른 동기화 및 특정 카테고리 내에서의 검색을 지원합니다.
Linux Mint 19에는 데스크톱 환경에 따라 달라지는 업데이트 된 응용 프로그램과 기능이 포함되어 있습니다. 예를 들어 Cinnamon 버전에는 Cinnamon 3.8이 포함되어 있습니다.이 App은 Windows를보다 빠르게 렌더링하고 USB 장치로 파일을 옮길 때 지연을 줄이며 새로운 아이콘 덕분에 어두운 테마를 더 잘 지원합니다.
LInux Mint 19 계피는 또한 사운드 를 11 ... 또는 오히려 150 으로 크랭크하는 옵션을 제공합니다 (사운드 설정에서 0 ~ 150 % 사이의 최대 볼륨 레벨을 설정할 수 있음).
Mintbox Mini 2는 10 와트 Intel Celeron J3455 쿼드 코어 Apollo Lake 프로세서를 기반으로하며 Linux Min 19 소프트웨어와 함께 제공됩니다.
이 제품은 알루미늄 및 아연 다이 캐스트 부품, 상단에 냉각 핀, 먼지가 들어 가지 않도록 환기구가없는 모든 금속 디자인의 팬이없는 컴팩트 한 섀시가 있습니다. 컴퓨터의 크기는 약 4.4 "x 3.3"x 1.3 "이고 무게 약 12 온스.
이 제품은 2 개의 기가비트 이더넷 포트, 4K 60Hz 비디오를 지원하는 2 개의 미니 DIsplayPort 출력 및 4K / 30Hz를 지원하는 1 개의 HDMI 1.4 출력을 특징으로합니다. USB 3.0 포트 2 개, USB 2.0 포트 2 개, 헤드셋 및 라인 출력 잭, microSD 카드 판독기, 802.11ac WiFi 및 Bluetooth 4.2가 있습니다.
케이스를 열면 메모리와 스토리지를 업그레이드하거나 교체하는 것이 상대적으로 쉽습니다. 이 시스템은 M.2 2260/2242 SATA III SSD를 지원하며 최대 16GB DDR3L-1866 메모리를 지원하는 단일 204 핀 SODIMM 슬롯이 있습니다.
컴퓨터는 리눅스 민트와 함께 배송되지만 Windows 10, FreeBSD 또는 기타 GNU / Linux 기반 운영 체제도 지원할 수 있습니다.
Mintbox Mini 2는 가장 저렴한 미니 PC입니까? 아니. 가장 강력한가요? 확실히. 그러나 그것은 Windows 10 이외의 다른 제품과 함께 제공되는 소형 데스크탑을 구입하려는 사람들에게는 매우 견고한 소형 팬리스 장치입니다.
또한 5 년 보증이 제공되며 CompuLab의 fitlet2 컴퓨터 와 동일한 디자인으로 2.5 "하드 드라이브, PoE (Power over Ethernet), 4GB 모뎀 지원 등의 추가 기능을 제공 할 수있는"FACET "카드를 지원합니다 , 또는 추가 USB 포트.
이것은 Marc Goodner가 주최 한 비 주최 게스트 게시물입니다 : Microsoft의 수석 프로그램 관리자이자 Toradex의 Jeremias Cordoba : Innovation Engineer입니다.
오늘날 많은 임베디드 디바이스가 리눅스를 기본 운영체제로 사용하고 있습니다. 이는 개발 컴퓨터에서 Windows를 실행하는 개발자에게 어려움을 낳습니다. 이 기사에서는 빌드 환경 용 컨테이너를 사용하여 Windows 호스트 PC에서 임베디드 ARM 장치에 대한 최신 Visual Studio for C ++ 개발을 사용하는 새로운 방법에 대해 설명합니다. 우리가 배치 할 장치 는 Arm Cortex A-7을 특징으로하는 NXP i.MX 6ULL SoC를 사용하는 Toradex Colibri System on Module의 제품군입니다 . 데모 프로젝트로 Bluetooth 센서를 Toradex Colibri 모듈과 연결합니다.
이 경우에 대한 Visual Studio 지원은 초기 상태이므로 앞으로 몇 개월 안에 Microsoft 및 Toradex의 개선 사항을 확인할 수 있습니다.
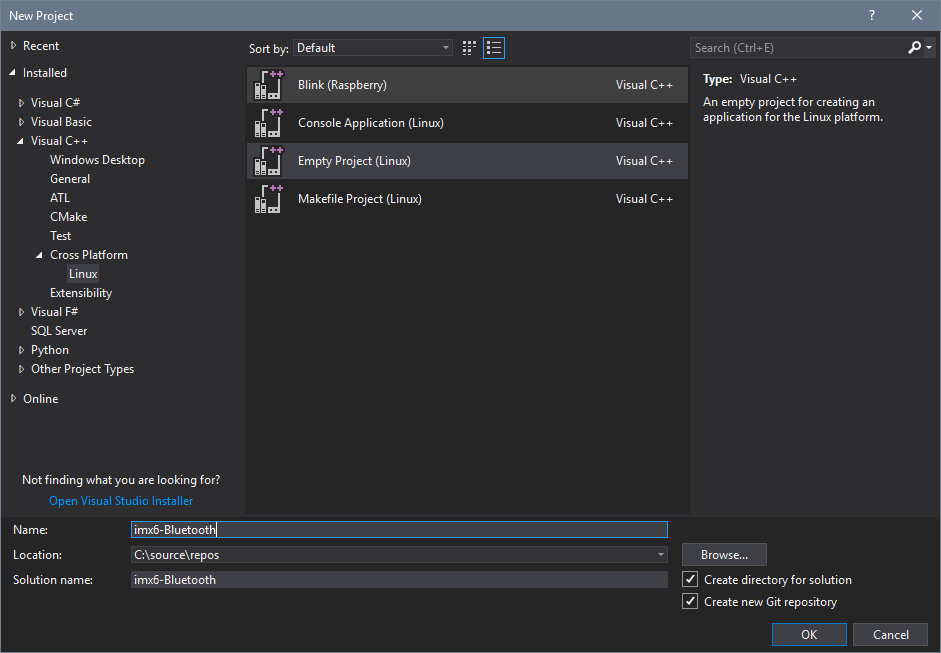
빈 리눅스 프로젝트를 만들어 시작하십시오. 파일> 새로 만들기> 프로젝트로 이동 한 다음 Visual C ++> 크로스 플랫폼> Linux 를 선택하고 빈 템플릿을 선택하십시오. 여기서 우리는 imx6-Bluetooth라는 프로젝트의 이름을 지정합니다.
확대하려면 클릭하십시오.
빌드 컨테이너 만들기
이 데모에서는 빌드 환경을 설정하기 위해 컨테이너를 사용하려고합니다. 먼저 컨테이너 이미지를 레지스트리에서 로컬로 가져옵니다.
1
docker pull jeremiascordoba/development:SDK
먼저 프로젝트를 만들었으므로 소스가 살고있는 디렉토리가 있습니다. 우리는 그것을 컨테이너에 매핑 할 것입니다. 여기 내 저장된 : C : \ 소스 \의 repos \ imx6 블루투스 \ imx6 블루투스 . 이 디렉토리는 최상위 솔루션 디렉토리가 아니라 프로젝트 디렉토리입니다. 다음 명령에서이 값을 프로젝트를 저장 한 위치와 일치하도록 조정하십시오.
이제 빌드 도구가 포함되어 있고 명령을 실행하는 데 필요한 Visual Studio 용 SSH 포트가있는 시스템에서 colibri_sdk라는 실행 컨테이너가 있어야합니다.
컨테이너와 장치에 Visual Studio 연결
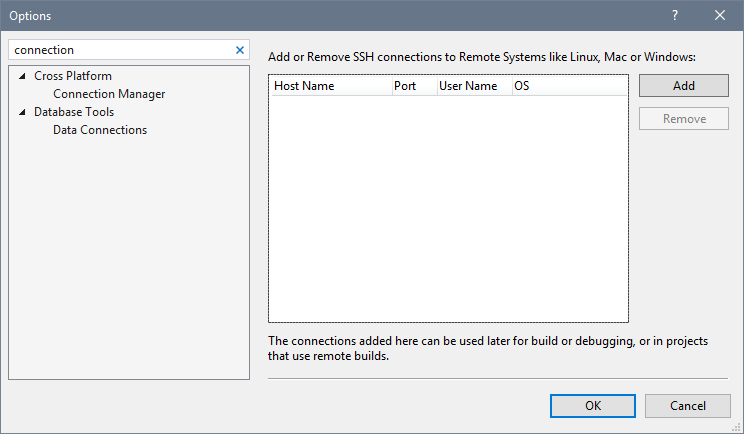
Visual Studio에서 도구> 옵션> 연결 관리자로 이동하십시오.
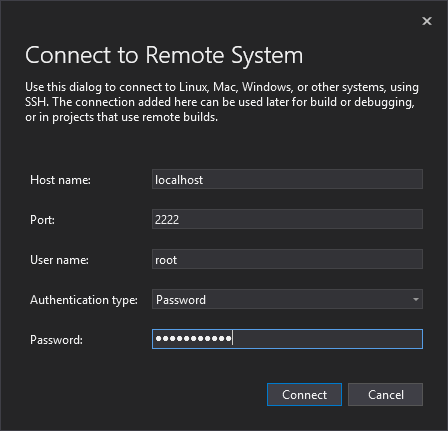
추가를 클릭하고 입력하십시오.
호스트 이름 : localhost
항구 : 2222
사용자 : root
비밀번호 : toradex_sdk
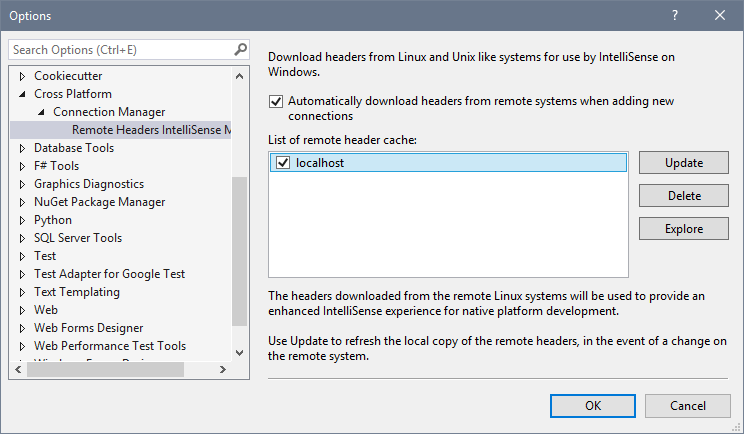
Visual Studio는 자동으로 컴파일러를 쿼리하여 포함 위치와 컴파일러 플래그를 가져와 특정 컴퓨터 IntelliSense를 제공합니다. 그러나 우리가 사용하고있는 크로스 컴파일러는이 정보로 빌드되지 않습니다. 우리는 수동으로 포함 위치를 제공 할 수 있습니다. 연결이 완료되면 연결 관리자에서 노드를 확장하고 원격 헤더 IntelliSense 관리자를 선택합니다.
탐색을 선택하십시오 . 그러면 Windows 탐색기가 나타납니다. 파일 복사 settings.xml.unused을 하고 이름을 Settings.XML이 . 텍스트 편집기에서 파일을 열고 useCompiler 의 값 을 false로 변경하십시오 . 이제 CDATA 블록의 시작 부분에 includeDirs 에 다음 위치를 추가하십시오 .
파일을 저장하십시오. 지시 사항의 뒷부분에서이 경로가 필요할 것이므로이 탐색기 창을 열어 두십시오. 긴 Windows 사용자 이름이있는 일부 사용자의 경우 CDATA 블록에 위의 위치 만 포함되도록해야 할 수도 있습니다. 이 변경은 이후 단계에서 긴 파일 경로 오류를 방지합니다.
Visual Studio 에서 원격 헤더 IntelliSense 관리자에서 업데이트 를 누릅니다 . 연결을 설정했을 때보 다 더 많은 시간이 걸릴 것입니다. 이제 헤더 세트가 모두 반환됩니다. 완료되면 연결 관리자를 클릭 하고 장치에 연결을 추가하십시오. 사용자의 루트 IP 주소를 사용하고 암호는 비워 둡니다. Visual Studio에서 대상에서 헤더를 가져 오기 위해 컴파일러를 찾을 수 없다는 오류가 발생합니다. 이 장치에서 컴파일하지 않고 배포 만하면됩니다.
닫기 를 선택 하여 오류를 닫고 확인을 다시 클릭하여 옵션 대화 상자를 종료하십시오.
소스를 추가하고 컨테이너에서 교차 컴파일
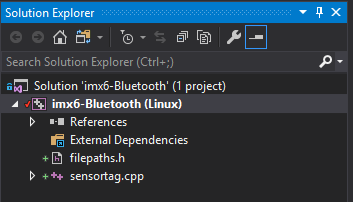
우리는이 SensorTag 레포의 샘플을 사용하고 있습니다 : durovsky / SensorTag2650 . 우리는 전체 프로젝트가 아닌 SensorTag와 통신 할 때만 소스를 사용합니다. src \ senortag.cpp를 복사 하고 \ filepaths.h 를 VS 프로젝트 디렉토리에 로컬로 포함하십시오. 솔루션 탐색기에서 프로젝트를 마우스 오른쪽 단추로 클릭하고 추가> 기존 항목을 클릭하십시오 . 방금 추가 한 파일을 선택하십시오. 이제 프로젝트는 이렇게 보일 것입니다.
filepaths.h 보세요 . 장치에 파일이있는 경로가 존재하는지 확인하십시오.
이제 Visual Studio에게 ARM 타겟 보드를 컴파일하는 방법을 알려줄 필요가 있습니다. 프로젝트를 마우스 오른쪽 버튼으로 클릭하고 속성을 클릭하십시오. 프로젝트 디렉터리를 컨테이너에 매핑 했으므로 복사 원본 노드를 선택하고 기본값을 아니요로 변경합니다. 우리가 사용하고있는 빌드 컨테이너는 크로스 컴파일러에 대해 gcc의 앨리어싱을 적용 했으므로이 프로젝트에서 컴파일러의 기본값을 무시할 필요가 없습니다. C ++ 노드를 확장하고 명령 행을 선택하십시오. 다음을 추가하십시오.
이제까지 시도한 것을 검증하기 위해 프로젝트를 빌드하고 빌드하십시오. 위의 사항을주의해서 확인하십시오.
지금까지 빌드 컨테이너를 설치하고 Visual Studio에 장치를 연결하고 ARM 개발 보드에서 실행할 수있는 컨테이너에서 실행 파일을 크로스 컴파일했습니다. 이제 출력물을 보드에 가져와야합니다.
크로스 컴파일 된 출력물을 Colibri i.MX 6ULL 장치로 복사
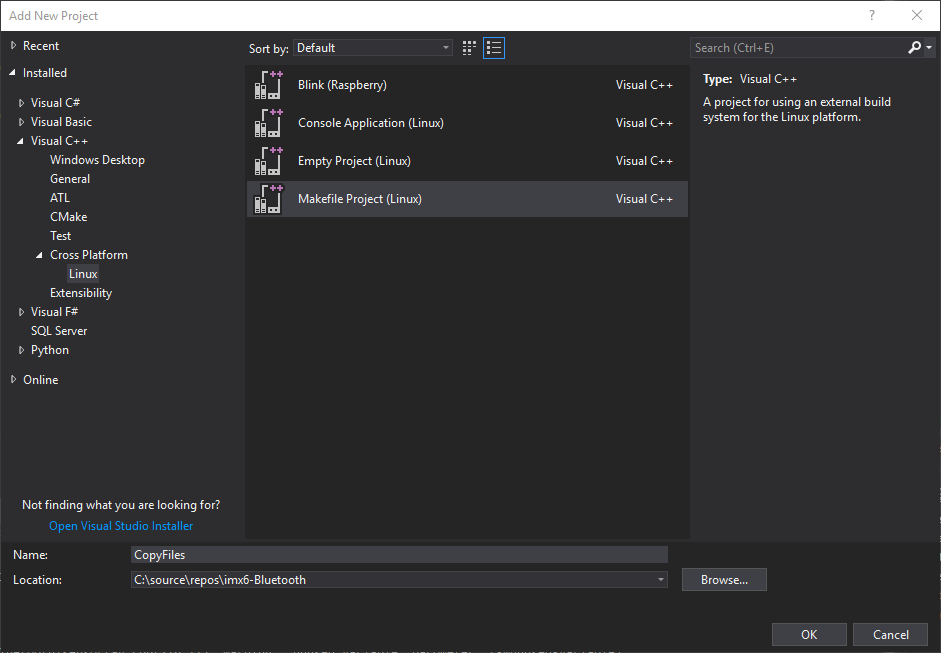
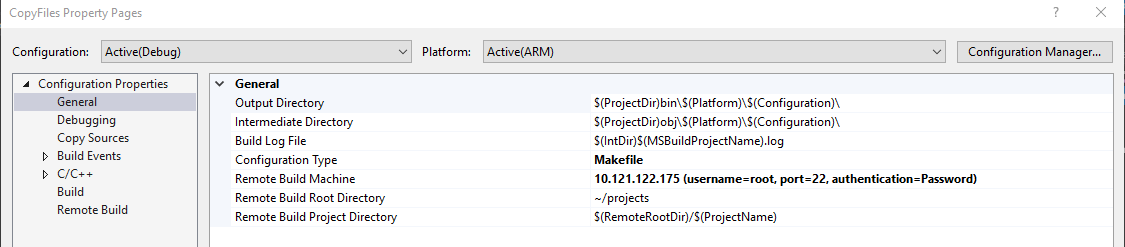
우리는 크로스 컴파일 된 출력을 원격 장치로 복사하는 또 다른 프로젝트를 추가 할 것입니다. 솔루션 탐색기에서 솔루션을 마우스 오른쪽 단추로 클릭 한 다음 추가> 새 프로젝트 를 클릭하십시오 . 대화 상자에서 Makefile을 선택하십시오.
확대하려면 클릭하십시오.
우리는 소스 (imx6-Bluetooth)를 빌드하고 디버깅하는 데 사용되는 프로젝트가 있고, 원격 ARM 대상에 출력을 복사하는 또 다른 (CopyFiles) 솔루션을 구성하고 있습니다. 여기서 우리는 x64 구성을 빌드에 사용하고 ARM을 사용하여 디버그를 수행합니다. 프로젝트 종속성 아래의 솔루션 속성에서 프로젝트 CopyFiles가 CrossCompileProject에 종속되도록 설정합니다. 솔루션을 마우스 오른쪽 단추로 클릭하고 속성을 선택하십시오. 이제 Project Dependencies를 선택하고 CopyFiles를 imx6-Bluetooth에 의존하도록 설정하십시오.
확대하려면 클릭하십시오.
이제 구성 속성 아래에서 CopyFiles를 변경하여 ARM을 사용하지만 다른 모든 것은 x64로 남겨 둡니다.
확대하려면 클릭하십시오.
우리는 여기서 Platform을 ARM으로 바꾸고 모든 것을 Build를 선택 취소합니다. 이를 통해 디바이스 디버깅을 위해 imx6-Bluetooth 플랫폼을 ARM으로 변경할 수는 있지만 빌드를 시작할 수는 없습니다. 이것이 컨테이너에있는 크로스 컴파일러를 사용하는 x64 프로젝트의 목적입니다.
확대하려면 클릭하십시오.
솔루션 속성 페이지를 닫습니다.
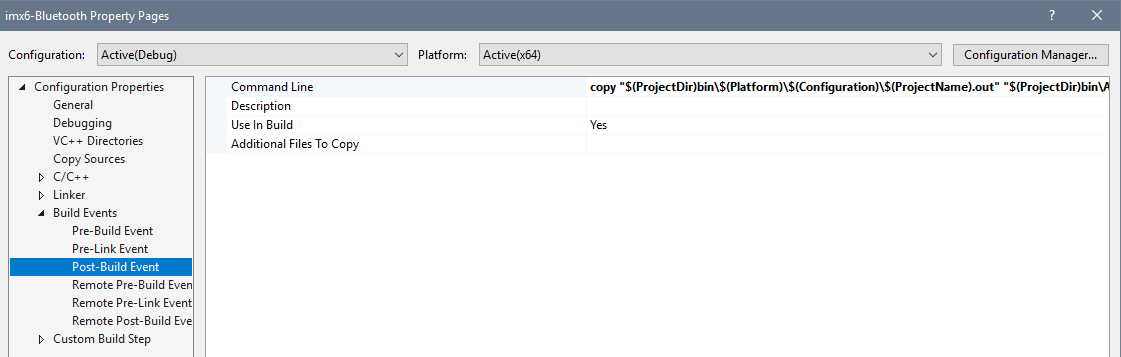
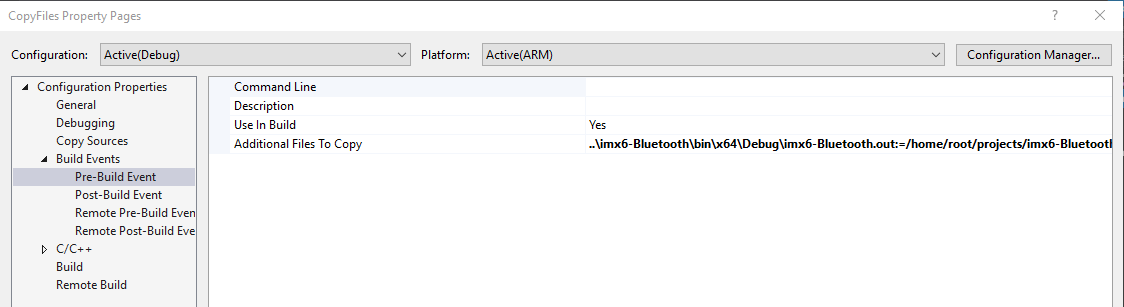
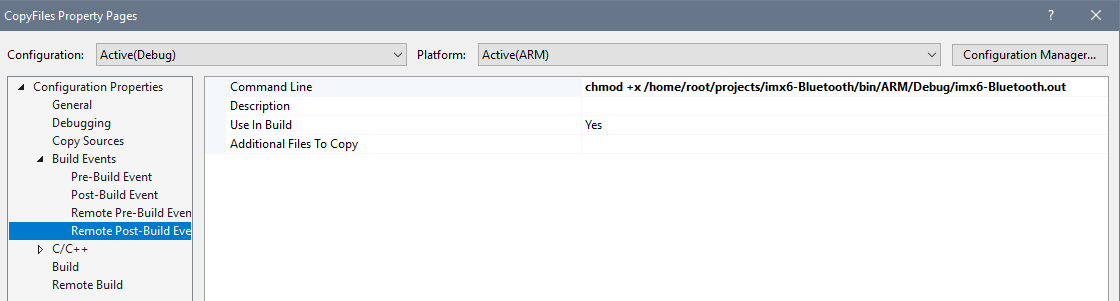
이제 imx6-Bluetooth 프로젝트를 마우스 오른쪽 버튼으로 클릭하고 속성을 선택하십시오. x64 플랫폼이 활성 상태인지 확인하십시오. 빌드 이벤트> 빌드 이벤트 게시로 이동 하여 다음 명령 행을 추가하십시오.
모든 것이 올바르게 빌드되고 복사되도록하십시오. 솔루션을 마우스 오른쪽 단추로 클릭하고 솔루션 빌드를 클릭 하십시오 .
찾을 수없는 경로로 인해 x64 프로젝트의 출력을 복사 할 수 없다는 오류가 발생하면 Explorer에서 프로젝트 위치를 열고 bin 폴더 아래에 하위 디렉토리 ARM \ Debug를 만듭니다.
일단 모든 것이 빌드되면 디버깅이 작동하도록하십시오.
Colibri i.MX 6ULL 장치에서 배포 및 디버그
먼저 SensorTag를 켜고 Colibri IMX6ULL 장치에 연결하고 다음 명령을 실행하십시오
1
hcitool lescan
SensorTag의 주소를 적어 두십시오.
1
2
3
root@colibri-imx6ull:~# hcitool lescan
LE Scan...
A0:E6:F8:C3:2C:84(unknown)
이제 Visual Studio에서 플랫폼을 ARM으로 변경하십시오.
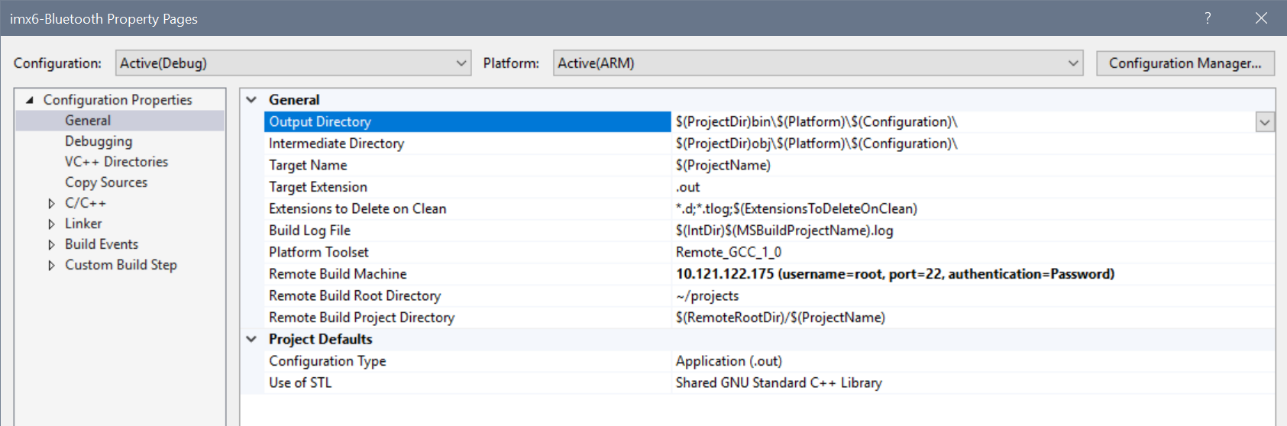
이제 일반 탭의 imx6-Bluetooth에 대한 프로젝트 속성에서 원격 컴퓨터를 로컬 호스트에서 장치로 변경합니다.
확대하려면 클릭하십시오.
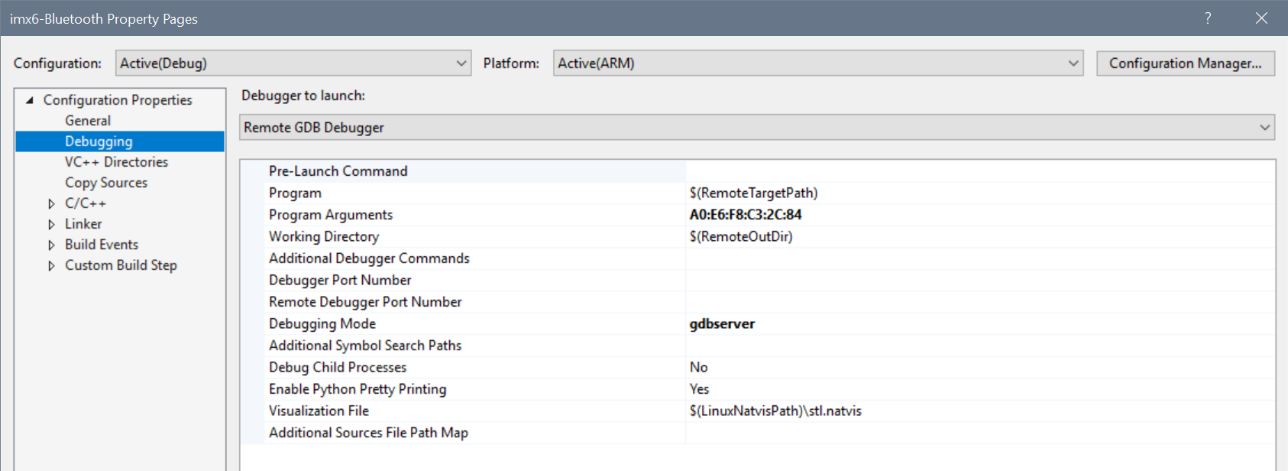
디버깅을 구성하려면 디버깅 속성 페이지로 이동하십시오. 프로그램 인수에서 SensorTag 주소를 제공합니다. 장치에 gdb가 설치되어 있지 않으므로 디버깅 모드를 gdbserver로 변경하십시오.
확대하려면 클릭하십시오.
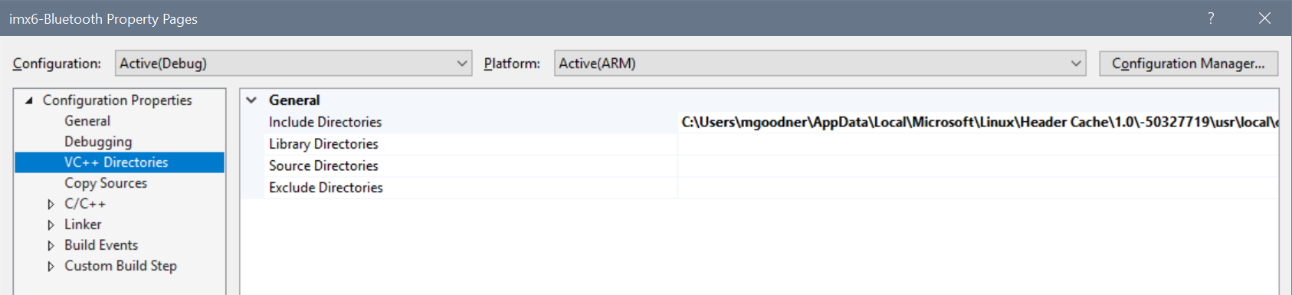
이 연결에는 헤더가 없기 때문에 IntelliSense를 사용할 수 없습니다. 다시 얻으려면 VC ++ Directories 프로젝트 속성으로 이동하십시오. 컨테이너 연결을 위해 머리글이 저장된 위치로 이동하십시오. 하위 디렉토리 usr \ local \ oecore-x86_64 \ sysroots \ armv7at2hf-neon-angstrom-linux-gnueabi \ usr \ include로 이동하십시오 . 이제 전체 경로를 복사하고 그 값을 Include Directories 필드에 넣으십시오.
확대하려면 클릭하십시오.
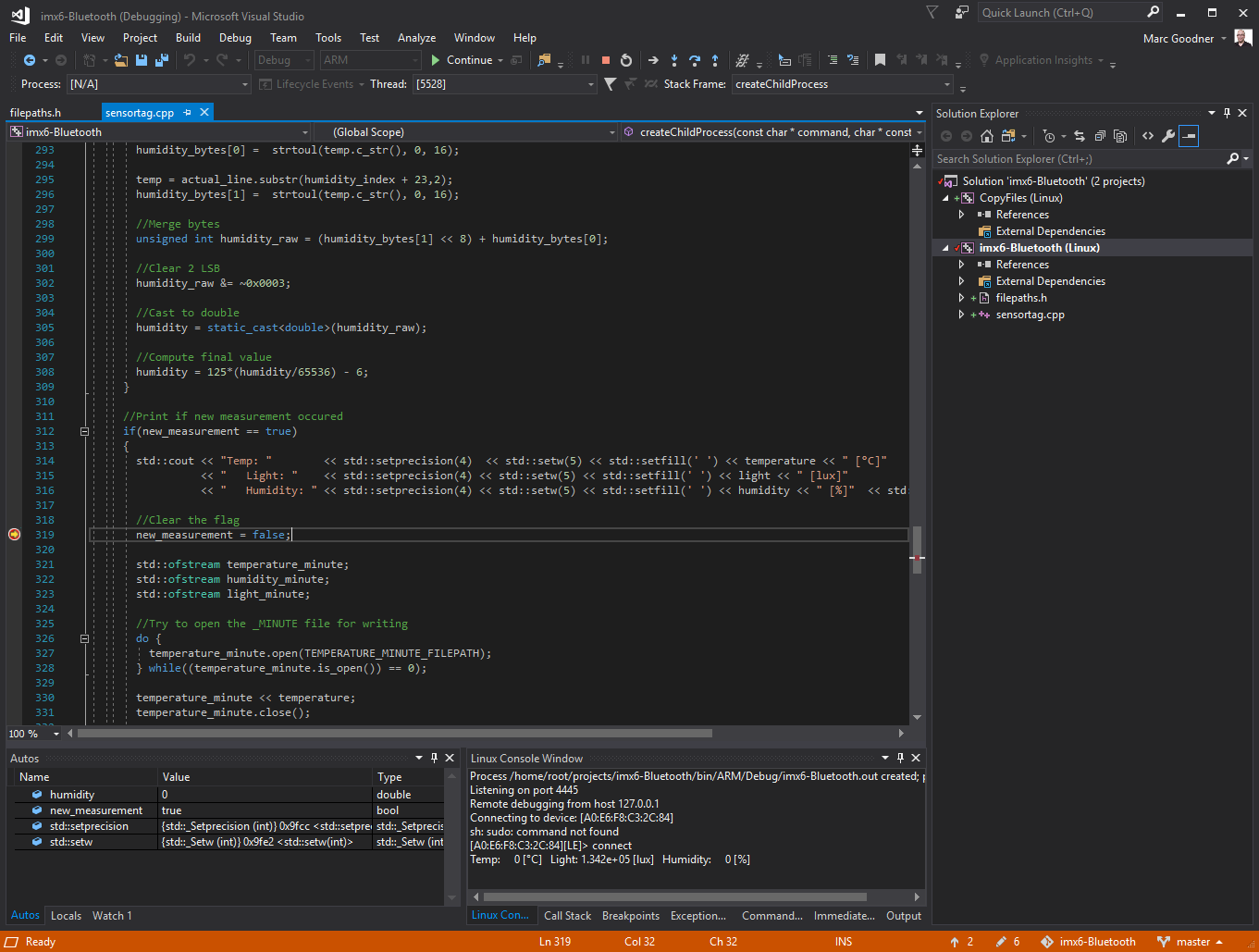
new_measurement에 대한 플래그가 지워진 행 319 주위에 중단 점을 설정하십시오. 이제 F5를 통해 디버거를 시작하십시오.
다음과 같은 것을보아야합니다.
확대하려면 클릭하십시오.
결론
이것은 다소 작은 프로젝트 였지만 Windows에서의 임베디드 개발에 대한 향후 전망을 강조합니다. Visual Studio에서 Linux 임베디드 장치에 응용 프로그램을 배포하고 디버그하는 기능은 시간이 지남에 따라 향상 될 것입니다. 임베디드 디바이스의 미래는 리눅스에 뿌리 내리고있는 것처럼 보이지만 현재는 윈도우 환경을 포기할 필요가 없다.
HDMI 2.1은 새로운 펌웨어 업데이트로 삼성 QLED TV에서 시연 된 자동 저 대기 시간 모드 (ALLM) 및 가변 재생률 (VRR) 게임을 제공하여 해당 기능 지원을 Microsoft Xbox One X에 추가합니다. HDMI 2.1 기능에 대한 자세한 내용은 게임 내 다른 동영상보기. HDMI 2.1의 VRR 기능은 AMD의 FreeSync 및 NVIDIA의 G-Sync와 같은 동적 새로 고침 속도 기술과 유사하게 간주 될 수 있습니다. 이제는 새로운 게이밍 PC 모니터와 새로운 그래픽 카드를 구매하는 게이머들에게 인기가 있지만 HDMI 2.1의 대상 시장도 여기에 있습니다. 게이머가 향후 4K TV에서 이러한 기능을 즐길 수 있습니다. 따라서 시장에 나와있는 기존 4K TV의 펌웨어에 추가되는 경우가 아니라면 곧 지원 될 4K TV를 기대하십시오 (이 QLED 4K TV의 evt 펌웨어 업데이트의 일부처럼). 여기에는 펌웨어로 업데이트됩니다. Xbox One X와 같은 게임 콘솔
아날로직은 비디오 출력을위한 8.1Gbit / s DisplayPort 1.4와 10Gbit / s USB3 Gen2 데이터 전송을위한 최신 ANX7440 솔루션을 선보였다. 대량 생산이 준비되어있는 ANX74xx 계열의 USB-C 리 타이머 솔루션은 랩톱, 2-in-1 컨버터블 랩탑, 데스크탑 PC, 모니터 및 USB-C 액세서리 용으로 제공되며, Analogix ANX7440은 최초의 프로토콜 인식 재구성 솔루션으로, 타이밍 멀티플렉싱 ARM Powered Qualcomm Snapdragon 835 용 DisplayPort 및 USB 3.1 인터페이스 HP Envy x2, Intel, AMD 및 Nvidia CPU / GPU를 USB-C 커넥터에 연결 한 Windows 10 랩톱은 USB-C 리 타이머를 통과 한 최초의 제품입니다 USB-IF 및 VESA 플러그 테스트에서의 상호 운용성. SSC (SRIS) 및 비트 레벨 리 타이머 (BLR) 아키텍처에 독립적 인 별도의 기준 클록을 사용하여 USB 3.1 Gen2 10Gbps에서 최대 23dB 채널 손실을 복구하는 손실 보상을 보장하는 순수 USB-C 리 타이머입니다. 이 제품은 4-re-timer 연결을 지원하는 최신 USB 3.2 부록 E 요구 사항을 완벽하게 준수하며 USB 3.2 CTS 요구 사항을 충족하면서 4 개의 리 타이머를 연속으로 데이지 체인 방식으로 지원합니다. 링크 트레이닝 튜너 블 PHY 리피터 (LTTPR) 모드와 AUX 스누커가있는 투명한 모드를 갖춘 완벽한 DisplayPort 리 타이머로, DisplayPort HBR3 8.1Gbps에 대해 최대 20dB 채널 손실을 복구하는 손실 보상을 보장합니다.
ANX74xx 제품군에는 다음이 포함됩니다.
ANX7440 - USB-C 포트를 통한 DisplayPort 용 통합 10Gbps 리 타이머 및 USB-C 스위치; ANX7430 - USB 3.1 Gen2 USB-C 포트 용 통합 10Gbps 리 타이머 및 USB-C 스위치; ANX7490 - USB 3.1 Gen2 USB Type-A, Type-B 및 USB Type-C 포트 용 통합 10Gbps 리 타이머, ANX7496 - 미니 DP, 표준 DisplayPort 및 USB-C 포트 용 8.1 Gbps DisplayPort 리 타이머 통합.