하기 제품 중에 제가 써 보면서 괜찮은 제품의 경우, 별도로 공구를 검토해 보고자 합니다 .^^
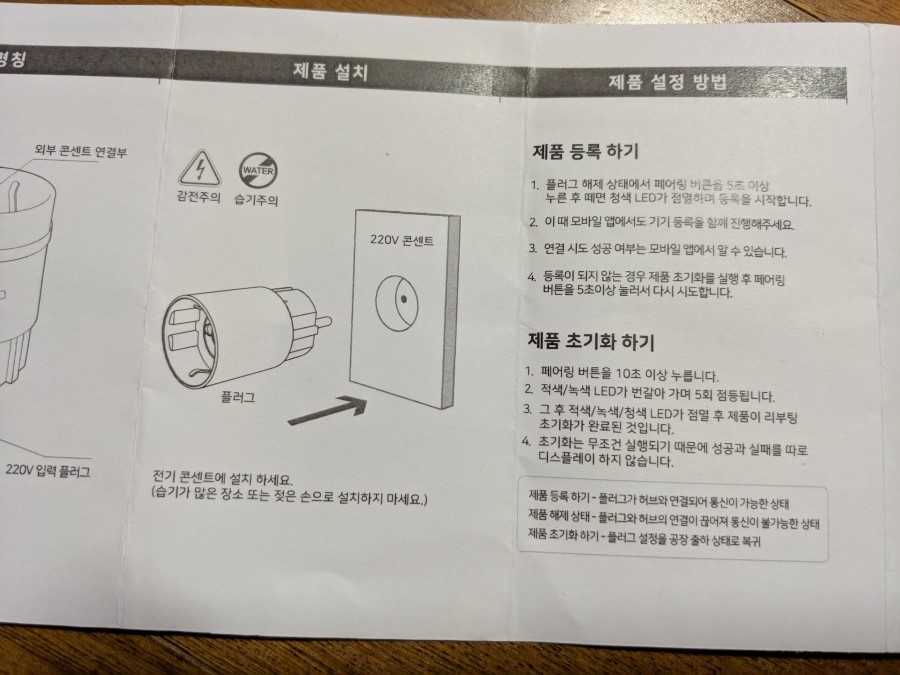
금번 리뷰글은 IoT 스마트 플러그 입니다.
스마트플러그는 저도 수년 전부터 WiFi용 제품을 써 보았습니다만, 단품 스마트플러그 On / Off 기능은 그다지 매력적인 기능은 아니었습니다.
그러나, 최근 스마트플러그 제품 중에는 전력소비량, 에너지소비량등도 지속적으로 측정해 주고,
허브 리피터 역활도 기능이 추가되어 있는 고급제품등도 속속 출시가 되고 있습니다. ^^
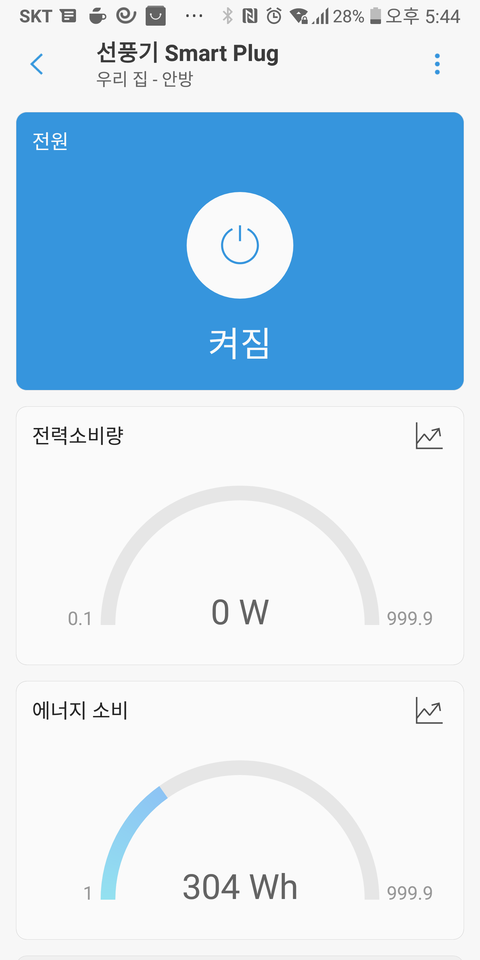
올해 더운 여름철에 선풍기를 대상으로 test를 하고 있었습니다.
제가 사용한 자동화 시나리오는 다음과 같습니다.
1. 스마트 플러그 기본동작 : 스마트플러그의 전력 사용량 모니터링 및 선풍기 전원 On / Off
2. Zigbee 온도센서 연동 : 안방의 실내 온도(에어콘 동작 기준)가 25도가 되면, 선풍기 전원 Off. 안방의 실내 온도(에어콘 동작 기준)가 27도가 되면, 선풍기 전원 On.
3. Zigbee 스위치 버튼 연동 : 안방 침대에 별도로 스위치 버튼을 연결하여
버튼으로 선풍기 전원 On / Off
이러한 스마트플러그와 다른 IoT기능 연동을 통하여
거실 및 댁내의 AV환경을 자동화 하는 것으로 목표로 하고 있습니다. ^^
이후 BT / IR 스마트 리모콘을 추가하고, 구글 음성명령을 통하여 방송시청 사용자 경험을 연동시킬 목적입니다.
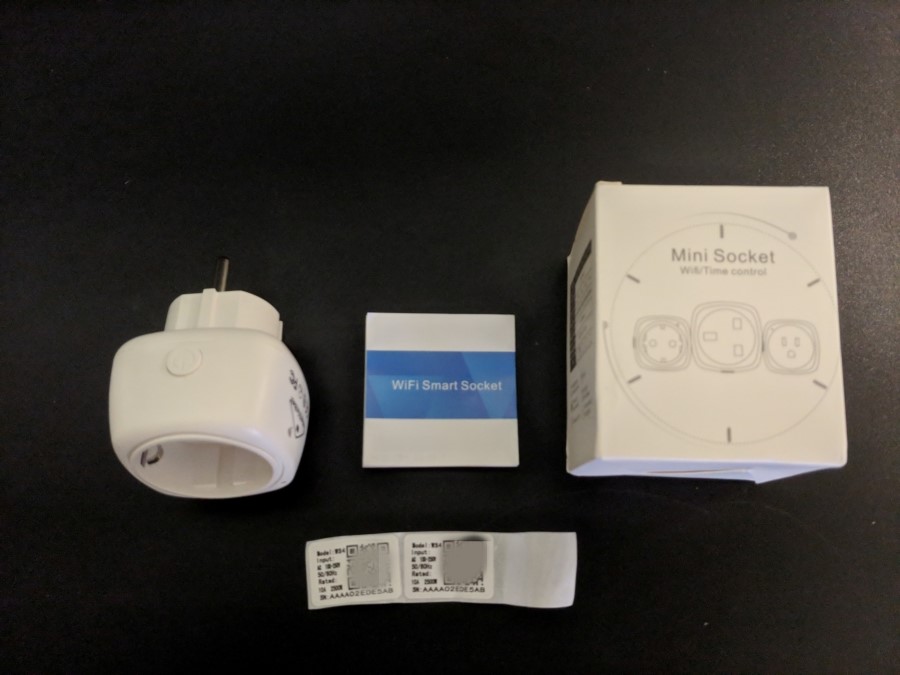
스마트플러그 기기 비교
IoT 스마트플러그 관련으로, 하기 7가지를 모아서 test해 보았습니다.
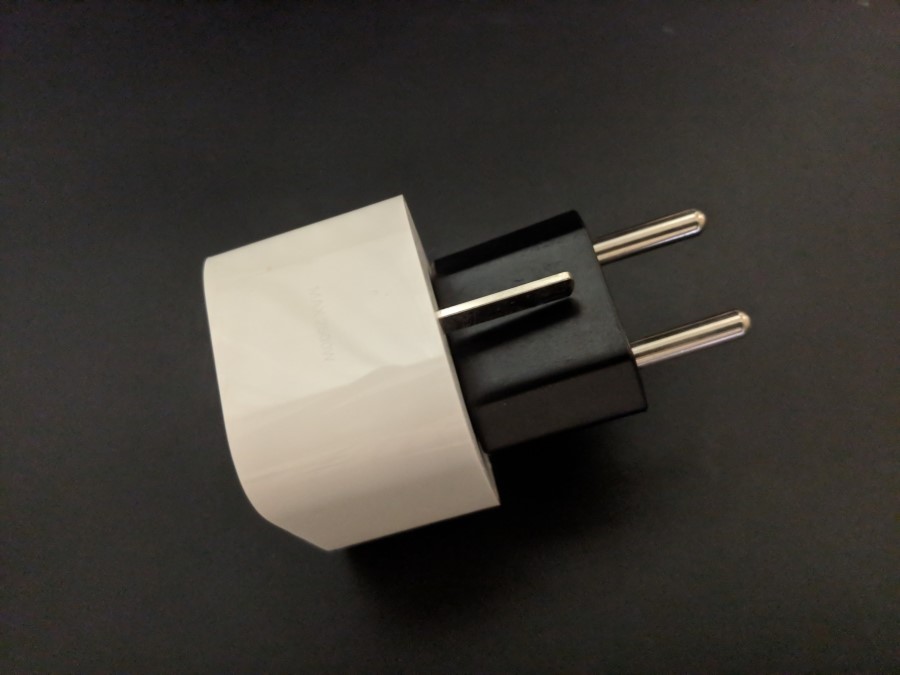
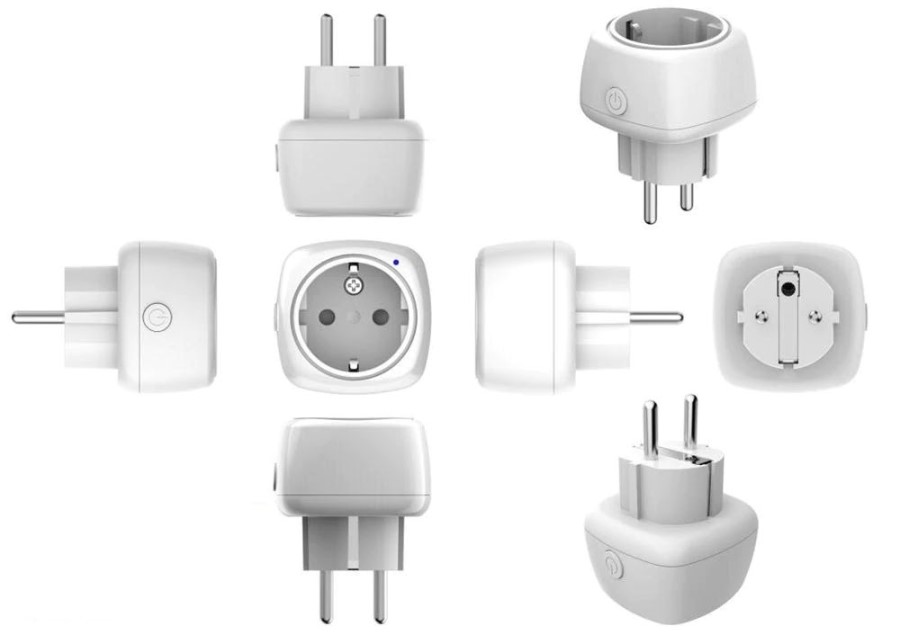
IoT스마트플러그 뒷쪽의 플러그 타입을 보시면, 모두 EU 또는 KR타입으로 사용이 가능하도록 맞춰 놓았습니다. 일부 스마트플러그에는 플러그 변환기인 돼지코를 꼽아서 설정해 놓았습니다.
이렇게 맞춰 놓고 제품 사진을 찍은 이유는 실제 사용시 스마트플러그 높이가 얼마큼 되는지를 확인 하기 위함입니다. ^^
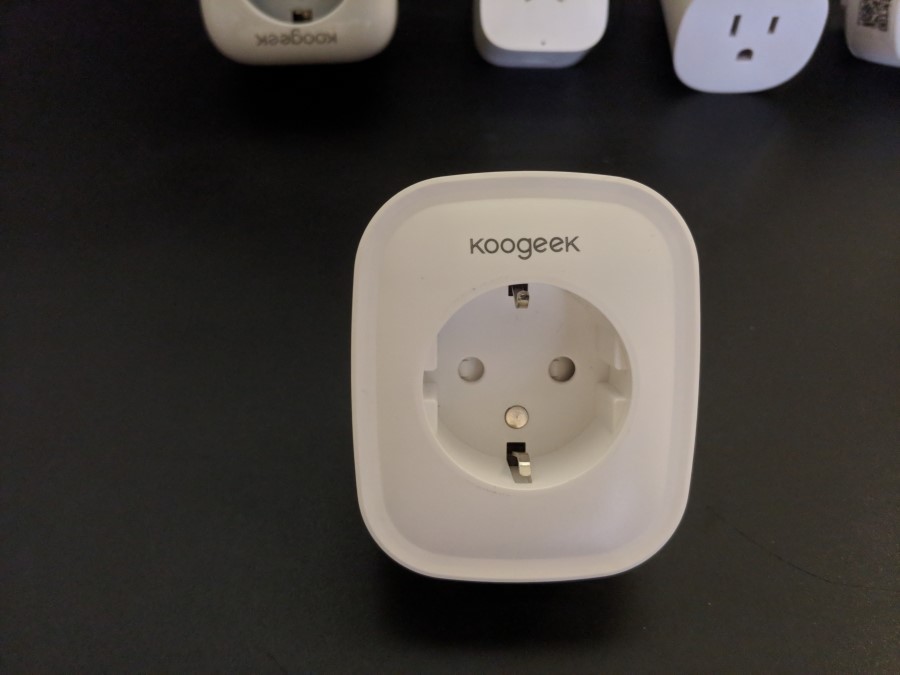
1. Koogeek WiFi 스마트플러그 (EU타입)
Koogeek는 일반적으로 Apple Homekit 호환 제품을 주력으로 하고 있는 회사입니다. 이 회사에서 WiFi용 스마트플러그 제품을 출시해서, 뭐가 혹시 다른가 ? 하고 구입하였습니다.
Koogeek답게 일단 제품이 아주 ~~ 큽니다. ^^;; USB-A 포트 2개를 지원합니다.
연결 APP은 Koogeek WiFi 전용 앱(2.4G)을 사용합니다만, Smart Life라는 앱에서도 호환 연결이 가능합니다.
Koogeek WiFi 전용 앱은 Koogeek Homekit앱 계정과 별개이기 때문에
Apple Koogeek앱에서 기기 공유가 되지 않습니다.
2. Koogeek Apple Homekit WiFi스마트플러그 (EU타입)
Koogeek의 주력 Apple Homekit 정식인증 스마트플러그입니다.
Apple Homekit 제품은 일단 고가(?)의 제품입니다. ^^;; Apple Homekit 인증 비용이 포함되어서 그런지 잘 모르곘습니다만, Apple Homekit 인증 제품도 그리 많지 않아서, 경쟁적인 요인이 아직 없어서 그런 것 같습니다. 제품 자체는 오랬동안 쓸 수 있을 정도로,
아주 튼튼하게 잘 만들어진 제품입니다. ^^
Apple용 Koogeek 앱(2.4G)을 통하여 기기 등록이 가능합니다. 등록시, 제품에 있는 HomeKit 8자리 숫지를 입력하시면 됩니다.
등록후 Homekit앱에서 기기 등록을 할 수 있습니다. (다이렉트 등록도 가능)
3. 샤오미 WiFi 스마트플러그 (CN타입)
USB-A포트가 없는 일반 WiFi 타입 스마트플러그 입니다.
USB-A포트 2개가 지원되는 강화 스마트플러그 제품도 있습니다만, USB-A 포트 지원 스마트플러그 제품은 구글 홈에 붙지를 않는 관계로, 이 제품을 사용하고 있습니다. ^^;;
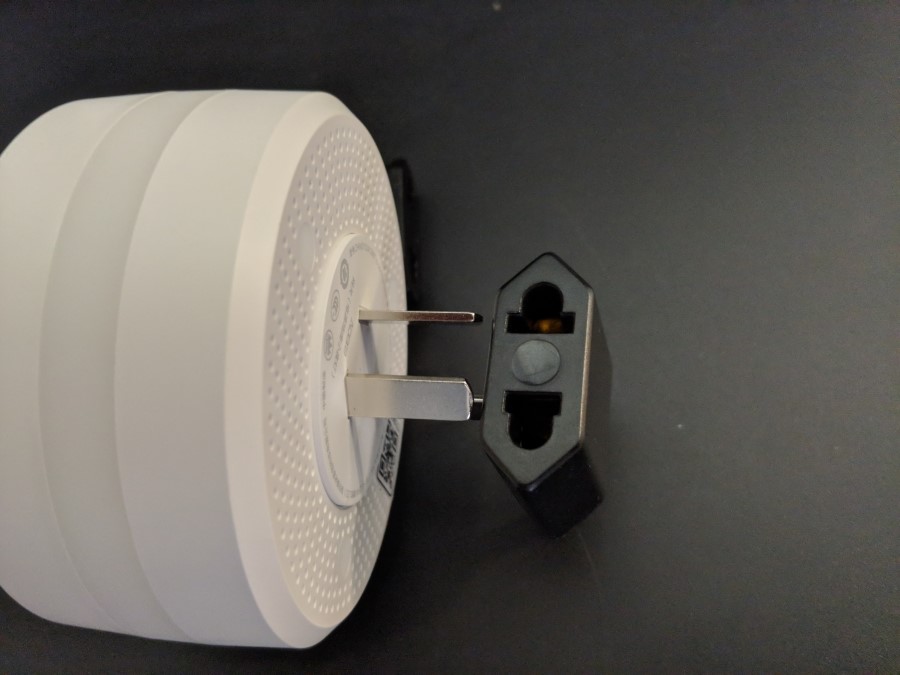
CN 8자 플러그타입이라서 한국에서 사용하려면 좀 골치가 아픕니다. ^^;; 그래서,옆에 추천 변환플러그(돼지코)를 하나 올려 놓았습니다. 이 EU 변환플러그(돼지코)는 이탈리아 EU타입 플러그 입니다만,
이렇게 8자 플러그에 꼽아도 아주 잘 맞습니다. ^^
이유는 EU 변환플러그(돼지코)의 입구가 넓게 설계 되어져 있습니다.
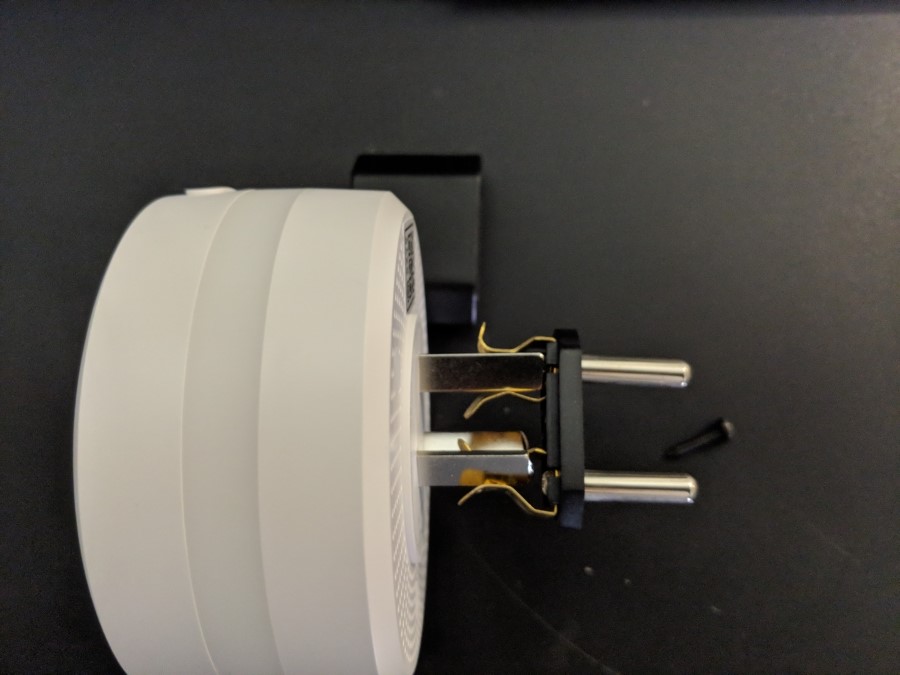
EU 변환플러그(돼지코)를 분해해서 보면, 하기 사진과 같이 내부에서 잡아 주게 되어 있습니다.
이 EU 변환플러그(돼지코)는 나사 하나를 풀어서 내부 전원 접촉 플레이트 간극을 쉽게 조절도 가능하기 때문에 사용이 편리합니다 ^^
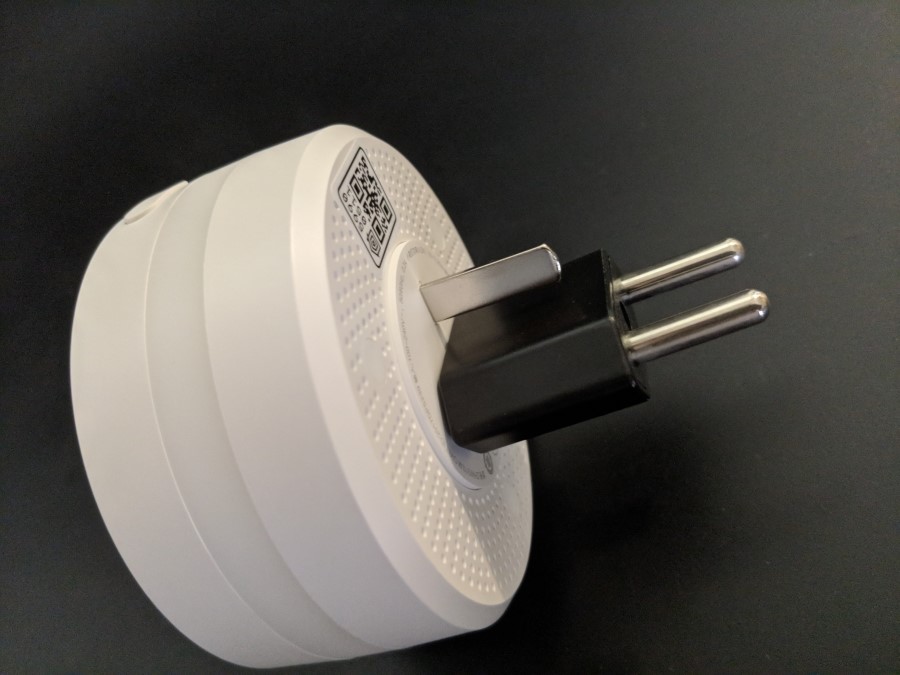
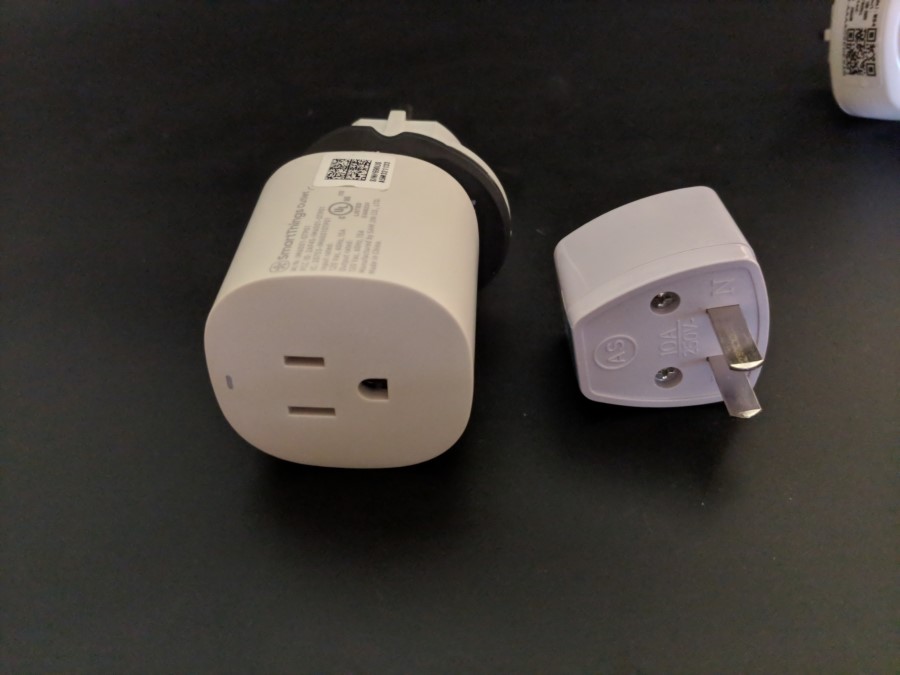
4. 북미향 Smartthings 공식 Zigbee 스마트플러그 (US타입)
저는 북미형 3세대 Smartthings 허브를 사용하고 있어서, 공식 ST 스마트플러그를 실전에서 쓰려고 무척 노력을 많이 하였습니다. ^^
이유는 이 제품이 많은 기능을 포함하고 있기 때문입니다.
기본적으로 리모트 전원 및 타이머 On / Off 기능 전력소비량(W) 모니터링 에너지 소비(Wh) 모니터링 등의 기능을 사용하실 수 있습니다.
그리고,Zigbee리피터역활도 해 주기 떄문입니다. ^^
Zigbee신호가 미약한 음영지역의 경우, 이 Smartthings 공식 Zigbee 스마트플러그를 사용시,
약전계 음영지역 부분을 보안할 수 있습니다
주) Smartthings Zigbee 허브 (2세대, 3세대 모두)는 최대 32개 기기까지만 허용합니다 (본인 허브를 빼면 31개 기기를 붙일 수 있다고 합니다.)
일단 공식 공식 Zigbee 스마트플러그는 US타입 플러그라서, 변환플러그(돼지코)를 반드시 써야 합니다. 이번에는 앞서 소개해 드린 것과 다른 변환플러그(돼지코)를 써 보았습니다. AUKTION는 변환플러그(돼지코) 중에는
최강의 제품이라서 가격도 무척 고가입니다. ^^;;
공식 Zigbee 스마트플러그는 US타입 플러그의 입력쪽도 US타입이라서,
추가로 11자 변환플러그(돼지코)를 꼽아야 합니다. ㅠ.ㅠ
그러다 보니, 거의 타워 수준 제품으로 변신(?) 하게 됩니다. 그래도 변환플러그(돼지코)를 좋은 것을 써서, 최대한 높이를 낮춘 상태입니다 ㅠ.ㅠ
스마트플러그 높이로 비교 해 보면, 이정도는 되어야 할 것 같습니다. ^^
다만, 앞으로 한국형 Smartthings 공식 Zigbee 스마트플러그가 출시되면,
변환플러그(돼지코) 없이도 사용이 가능하겠지만, 북미형 ST허브에는 붙일 수가 없어서 , 저에게는 사실상 도움이 되지 않습니다. ㅠ.ㅠ
==> 수정 190904 한국형 Smartthings 공식 Zigbee 스마트플러그가 출시되면, 북미 ST허브에서도 연결사용이 가능할 것으로 의견 받았습니다.
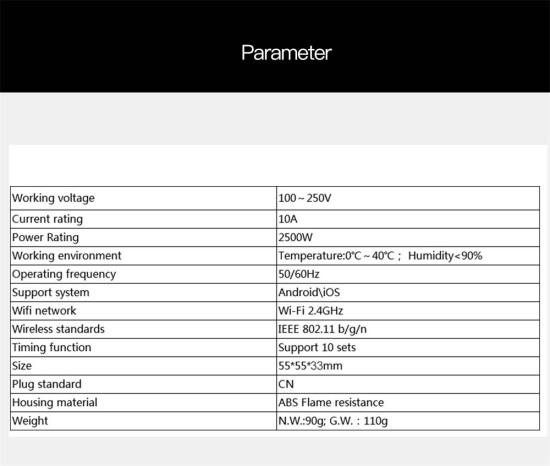
5. Neo Coolcam WiFi 스마트플러그 (2000W/10A, 3680W/16A)
아주 저렴한 제품 중에 하나이면서, 크기가 딱 마음에 드는 제품입니다 ^^
제품은 WiFi와 Zwave 제품등이 있습니다만, 현재 Zwave제품은 EU타입만 판매하고 있어서, 북미 ST 허브와는 호환성이 없습니다. ==> 추가 내용 190904) Zwave용 제품을 찾으시는 분들꼐서는 주파수는 북미형 / 플러그타입은 EU타입으로, 별도로 중국딜러에게 상의를 해 보시기 바랍니다. 그래서 WiFi용을 사용하여야 합니다.
Arm이 마침내 기계 학습 (ML : 기계 학습) 전용 프로세서 IP를 공식적으로 발표한다. Arm의 "Arm ML 프로세서 (Machine Learning Processor) '는 최근 각사로부터 잇달아 등장하고있다"신경망 프로세서 (NPU)」와 같이, 신경망 (Neural Network : NN)를 저전력 고성능에 실행한다. CPU 나 GPU, DSP의 확장이 아니라 처음부터 ML 처리 전용으로 설계된 전용 아키텍처이다. Arm은 Arm ML을 투입하는 것을 올해 (2018 년) 2 월에 발표했지만, 드디어 기술적 인 세부 사항을 공개했다.
Arm ML은 다른 Arm IP 코어와 마찬가지로 확장 가능한 코어에서 16 코어까지 IoT (The Internet of Things)에서 자동차, 심지어 서버 측까지의 확장 성을 갖추고있다. IoT과 모바일에 대응하기 위해 전력 효율은 7nm 공정시 1W 당 3 TOPS (trillion operations per second)로 매우 높다. ML의 인화 렌스 (Inference : 추론)에 최적화 된 아키텍처로 성능은 최대 구성이라면 4.6 TOPS (Trillion Operations Per Second)의 성능이다.
확장 가능한 고효율 Arm ML 프로세서
전체 구성이라면 4.6 TOPS (Trillion Operations Per Second)의 Arm ML
모바일 대상에 포함시켰다 NPU (Neural Processing Unit)는 많지만, Arm ML에 몇 가지 두드러진 특징이있다. 신경망은 "CNN (Convolutional Neural Network)"에 적합한 구조를 가지고 있지만, 'Recurrent Neural Network (RNN)」나 「Long / Short-Term Memory Network (LSTM)」등 다른 네트워크 모델에도 대응할 수있는 유연성을 가진다. 따라서 CNN이 향하고있는 이미지 인식뿐만 아니라 LSTM과 RNN을 사용 음성이나 자연 언어 등 다양한 인식 처리에 사용하는 것이 가능하고, 향후 새로운 NN에도 대응할 수있다.
Arm ML은 전력 효율을 높이기 위해 데이터 정확도는 INT8 (8-bit 정수) 만하고, 부동 소수점 연산은 지원하지 않는다. 유연한 처리를 위해, 적화 유닛 (Multiply-Accumulate : MAC) 어레이와 MAC 확장 한 프로세서의 2 개의 유닛을 구비한다. 인화 렌스의 전력 효율 향상의 핵심 "가지 치기 (Pruning : 전정)"하드웨어에서 지원하고 정리하여 압축 된 데이터를 저장하는 SRAM을 포함한다. 여러 컴퓨팅 엔진의 구성으로 확장 가능하게하기위한 제어용 동기화 유닛 (Sync Unit)를 포함한다.
한마디로 말하자면, Arm ML은 현재의 NPU 중에서는 최첨단 기능과 성능을 갖추고있다. 예를 들어, 가지 치기는 메모리 압축뿐만 아니라 컴퓨 테이션의 압축도 지원한다. 성능 범위에서 "iPhone X / 8"가 내장 NPU "Neural Engine"은 600 GOPS (Giga Operations Per Second)에서 Arm ML의 최대 구성은 7 배 이상이된다.
그러나 Arm ML은 올해 (2018 년) 중반 소프트 매크로 인 RTL (Register Transfer Level)의 출시이기 때문에 Arm ML 탑재 칩의 등장은 2019 년경이다. 2019 년 NPU로는 표준 레인지의 성능과 기능이 될지도 모른다.
정리에 하드웨어 인식 MAC 컨볼 루션 엔진
Arm ML 프로세서는 연산 코어 '컴퓨팅 엔진 (Compute Engine)'을 중심으로 구성되어있다. Arm ML은 최대 16 개까지의 컴퓨팅 엔진으로 구성 할 수있다. 각 컴퓨팅 엔진은 128 개의 8-bit 적화 유닛 (Multiply-Accumulate : MAC)를 갖춘 어레이 "MAC 컨볼 루션 엔진 (MAC convolution engine) '와 16-way의 MAC 유닛을 갖춘 프로세서 「프로그래머블 레이어 엔진 (Programmable layer engine : PLE) "을 포함한다.
Arm ML 프로세서 코어의 전체 구성
컴퓨팅 엔진의 개요
Arm ML은 ML 프로세서 전체를 제어하는 MCU 인 제어 장치가 각 컴퓨팅 엔진에 작업에서 작업을 파견한다. 컴퓨팅 엔진 끼리는 브로드 캐스트 네트워크에 연결되어 있으며, 동기화 장치가 컴퓨팅 엔진 간의 동기화를 제어한다. 호스트 인터페이스는 ACE-Lite에서 CPU와 I / O 일관성을 가지고 간다. 즉, Arm ML 코어 CPU 코어의 캐시를 스눕 수 있지만, 그 반대는 할 수 없다.
개별 컴퓨팅 엔진은 데이터를 저장하는 용량이 구성 가능 SRAM을 포함한다. "무게 (무게 : weight)"데이터의 저장과 '활성화 (activation) "데이터의 저장과 처리는 내부 SRAM에서 행한다. 컴퓨팅 엔진 내에서 피쳐 맵로드 유닛이 SRAM에서지도를 읽고 웨이트 디코더 (Weight decoder)를 정리하여 압축 된 무게 데이터를 읽고 디코딩을 수행한다.
제로 값의 데이터를 압축하여 필요한 메모리 용량을 줄이기
피쳐 맵과 웨이트의 압축에 의해 전력을 대폭 저감 할 수
인화 렌스 프로세서의 효율성의 핵심 정리
데이터의 공유에서 불필요한 메모리 읽기를 감소
데이터는 연산 어레이 인 MAC 컨볼 루션 엔진에 보내진다. MAC 컨볼 루션 엔진은 1D의 벡터 구성의 MAC 유닛 배열되어있다. NN의 2D 매트릭스 연산이 1D 배열에 매핑되는 점은 GPU (Volta 이외)의 구현과 비슷하다. NPU에 많은 2D 어레이 구성이 아닌 것은 가지 치기에 대한 하드웨어 지원을 촉진하기 위하여지도 모른다.
MAC 어레이는 인풋과 아웃풋은 8-bit하지만 내부 정밀도는 확장하고있다. 8-bit하고있는 것은 현재 NN 도구에서 인화 레퍼런스 용으로 지원되는 정밀도의 주류가 8-bit이다 때문이라고한다. MAC 배열은 룩업 테이블을 사용하는 것으로, 정리 된 부분의 연산을 건너 뛰고 빈 연산 슬롯을 채우기에 연산 처리량을 올리는 구조를 갖추고있다. 따라서 Arm ML의 ML 성능은 액면가의 연산 성능 이상으로 높아진다. Arm ML의 MAC 어레이 및 정리 대응에 대해서는 다른 글에서 좀 더 자세히 설명하고 싶다.
다용도 프로세서 PLE도 탑재
Arm ML 컴퓨팅 엔진은 MAC 배열과는 별도로 프로그램 레이어 엔진 (Programmable layer engine : PLE)라고 부른다 마이크로 컨트롤러를 포함한다. PLE의 실체는 Arm의 MCU (마이크로 컨트롤러)를 기반으로 신경망을위한 확장 엔진을 추가 한 프로세서이다. 벡터 명령과 NN위한 명령을 추가하고, 16 레인의 벡터 엔진을 갖추고있다. PLE는 MAC 배열에서 독립적 인 프로세서이며, 전용 SRAM 워킹 메모리도 내장한다.
컴퓨팅 엔진에 탑재 된 PLE
임베디드 프로세서를 확장 한 PLE 아키텍처
PLE는 한마디로 신경망 속에서 MAC 어레이에 적합하지 않은 모든 작업을 행하는 장치이다. NN 풀링 및 활성화의 제어 또한 가지 치기 등에 의한 압축 데이터 실행 제어 등을 PLE가 행한다. NPU는이 부분을 전용 하드 와이어 해지고있다 프로세서도 있지만, Arm은 프로그래머블 프로세서함으로써 유연성을 갖게했다. 컴퓨팅 엔진을 제어하는 마이크로 컨트롤러에 NN 연산 기능까지 갖게 한 것이 PLE이라고 볼 수있다.
Arm ML 전체 디자인을 보면 이미지 인식 CNN을 초기 목표로 개발 된 것으로 보인다. 하지만 PLE를 위해 다른 신경망 모델에 유연하게 대응할 수있다. 이것은 어떤 모델이 유행할지 예상이 어려운 현재의 ML에서 중요한 기능이다. 그러나 현재 인화 렌스 NPU는 다른 신경망 모델에 대한 유연한 대응을 진행하고 있기 때문에, Arm ML이 등장 할 무렵에는 다른 NPU도 비슷한 유연성을 갖추고있을 가능성이있는 .
Arm 기계 학습 솔루션을 보조하는 OD 프로세서
Arm은 기계 학습 일반 Arm ML 프로세서의 도입과 동기화하여 객체 인식 전용 "개체 디텍션 (Object Detection : OD) 프로세서」도 개정한다. Arm은 OD 프로세서를 이미 출시하고 있으며, Hive와 Hikvision의 보안 카메라에 내장 코어로 채용되고있다. Arm은 Arm ML 동시에 OD 프로세서도 제 2 세대로 강화하여 Arm ML과 조합 구성을 가능하게한다.
실시간 성이 높은 OD 프로세서
Arm ML 나 GPU의 조합도 가능
OD 프로세서는 이미지와 동영상 속에서 사람이나 얼굴, 자동차 나 도로 표지판 등을 확인한다. 객체 탐지 전문함으로써 실시간으로 정확한 디텍션을 가능하게한다. Arm ML과 함께 예를 들어, 동영상 속에서 OD 프로세서가 얼굴을 인식하고, ML 프로세서가 사람의 얼굴을 인식하고 있습니다.
2 세대 OD 프로세서는 풀 HD 60 프레임의 동영상 속의 군중에서 실시간으로 개별 얼굴 부분을 감지하는 등의 처리가 가능해진다. 개체 크기는 50x60 픽셀까지 Arm ML과 함께 개체 탐지를 Arm ML에서 오프로드하여 Arm ML의 NN을 고도화시킬 수있다.
ML위한 소프트웨어 스택도 정비
Arm은 급속히 기계 학습에 대한 대응을 진행하고있다. CPU에서는 Cortex-A 시리즈에 기계 학습을 지원하기위한 내적 (dot product) 명령을 추가합니다. GPU에서도, 최근 내적 명령을 추가 ML 성능을 대폭 향상시켰다. 이번 ML 전용 Arm ML을 투입하여 Arm은 ML 내용은 CPU와 GPU, NPU의 세 가지 솔루션을 나란히하게된다. 각각 성능 범위와 형상 및 전력 효율성이 크게 다르다. 인화 컨퍼런스에서 에너지 효율이 가장 높은 것은 Arm ML하지만 교육도 장치 측에서 수행하게되면 CPU와 GPU 쪽이 적합하다고 생각된다.
예상 Arm ML의 구현 패턴으로 먼저 스마트 폰과 태블릿 용 모바일 SoC에 도입 생각할 수있다. CPU와 GPU 이외에 제 3의 프로세서로 Arm ML NPU 코어가 탑재되는 경우 다. ML 워크로드의 전력 효율이 매우 높은 Arm ML 코어로 오프로드하여 기계 학습에 의한 인식 처리를 용이하게한다.
또한 Arm ML은 공간 구성도 가능하기 때문에, IoT를위한 내장 칩에 탑재가 예상된다. Arm ML의 최대 구성의 성능 범위는 향후 자동차도 시야에 넣을 수있다. 서버 사이드의 인화 레퍼런스 용으로는 에너지 효율성이 무기가된다.
또한 Arm은 기계 학습을위한 소프트웨어 스택도 서비스한다. Arm의 ML 솔루션에 최적화 된 라이브러리를 제공함으로써 기존의 프레임 워크이다 TensorFlow 및 Caffe / Caffe2, mxnet 또는 Android NNAPI에서 투명하게 Arm이나 파트너의 ML 하드웨어에 액세스 할 수 있도록한다.
Arm의 ML 솔루션을 어느 정도 추상화 라이브러리를 제공
Arm의 이기종 (Heterogeneous : 이종 혼합) 한 ML 솔루션을 지원하는 소프트웨어 스택
Google "스마트 디스플레이 '는 7 월 등장. LG, 소니, JBL, Lenovo 등 참가
Google은 8 일 (미국 시간) 개발자 발표회 'Google I / O'에서 음성 비서 'Google 길잡이」를 탑재 한 소형 디스플레이 단말기'스마트 디스플레이 '가 올해 7 월에 등장한다고 발표했다 . LG와 소니, JBL, Lenovo 등이 제품의 투입을 예정하고있다.
스마트 디스플레이
스마트 디스플레이는 터치 패널 디스플레이와 Google 도우미를 탑재 한 장치. 음성과 터치 조작을 조합하여 YouTube 동영상을 보거나 Google Duo 의한 영상 통화와 Google Photo 사진 달력 확인,지도보기 등의 이용을 상정하고있다.
Chromecast built in에도 대응하고 스마트 폰에서 선택한 콘텐츠를 디스플레이에 표시 할 수있다.
JBL의 스마트 디스플레이 'LINK VIEW "
Google I / O는이 외에도 AI 합성 음성을 사용하여 전화를하는 등 Google 도우미의 진화와 스마트 장치 용 차기 OS가되는 Android P에서 제공하는 배터리의 이용 효율 및 UI 디자인의 쇄신 도 발표되고있다.
JBL 링크 바 (Android TV와 사운드 바, HDMI 용 Google Assistant)
곧 이벤트 시작 구글 I / O 우리가 새로운 기기와 서비스 구글의 프레젠테이션이, 오늘 우리는 당신이 볼 수있는 제품 중 하나의 제 여과을 가지고, 그것은 사운드 바있다 JBL 링크 바 . HDMI 커넥터를 통해 TV에 연결하여 안드로이드 TV 시스템 과 Google Assistant 시스템 을 사용할 수있게 해주는 장치 로 통합 된 안드로이드 TV가있는 오디오 시스템과 TV-Box 간의 올인원 개념입니다.
이 새로운 사운드 바 JBL Link Bar 에는 안드로이드 TV 8 Oreo 가 설치되어 있습니다. 그 안에는 아주 현대적인 하드웨어, 아마도 Amlogic 의 새로운 SoC 중 하나 인 TV-Box의 변형이 있습니다. 에서 사운드 바 우리는 아이콘을 가지고 구글 길잡이 있는 우리가 음성 명령을 제공 할 수 있습니다 또는 직접 오디오 또는 비디오 컨텐츠를 시작 원격으로 콘텐츠를 재생할 Chromecast를 계산 아마 또한, 화면. 바의 힘은 통합 된 우퍼와 듀얼 트윗 이 포함 된 30W 이며 4 개의 HDMI 출력, 오디오 잭 커넥터 및 이더넷 포트가 있으며 가을에 출시 될 예정입니다.
우리는 여전히이 모델의 사양과 가격을 알지 못하지만이 제품에 관한 Google의 말에 따르면 Google I / O 에서이 부문에서 볼 수있는 첫 번째 모델 중 하나 이기 때문에 Assistant 사이에서 이러한 유형의 개념을 가진 더 많은 장치를 볼 수 있습니다 스피커 및 Android TV 환경에 통합되었습니다. Google은 Amazon Alexa 및 Fire OS 멀티미디어 시스템과 스피커를 통합 하는 Amazon Fire TV Cube 를 곧 발표 할 예정인 Amazon과 모든 분야에서 경쟁하기를 원합니다 .
포크 (Polk)는 Amazon Echo Dot의 헤드를 첫 번째 스마트 사운드 바인 Command Bar에 접목시킨 것으로 보인다.
포크
경쟁사가 Alexa 음성 보조자에게 자체 독점 마이크를 제공 한 반면, Polk는 CES 2018에서 첫 번째 사운드 바를 본질적으로 에코 도트 인 Command Bar와 함께 발표했습니다 .
커맨드 바는 아마존의 원거리 마이크와 컨트롤을 스피커에 통합 시켰기 때문에 스마트 홈 을 본격적인 에코 대체 장치로 사용할 수 있습니다 . 온보드 마이크는 볼륨, 뮤트, EQ 및 소스 선택과 같은 오디오 기능도 제어 할 수 있습니다.
Amazon 에코 시스템에 추가로 통합하기 위해 Command Bar에는 Amazon Fire TV Stick 및 Roku Express와 같은 장치 에 맞게 설계된 전용 HDMI 포트가 통합되어 있습니다. 사운드 바에는 후면에 USB 포트가 포함되어있어 이러한 스트리밍 동글에 전원을 공급합니다 .
포크 (Polk)는 사용자가 "시간에 관계없이 명령 모음을 공유하고, 날씨를 설정하고, 알람을 설정하고, 농담을하거나, 볼륨에 관계없이 홈 시어터의 어느 곳에서든 조명을 켜도록 쉽게 요청할 수있다"고 말했습니다. 알레 사의 높은 수준의 청력에 대한 우리의 경험을 감안할 때 우리는이 주장을 모호하게 생각합니다. 폴크가 리모컨에 보이스 어시스턴트를 활성화하고 동시에 재생 볼륨을 낮추는 "알렉사 액션 버튼"을 포함시킨 이유가 여기에 있습니다.
포크
듀얼 3 인치 풀 레인지 드라이버, 2 인치 1 인치 트위터 및 이식 된 무선 6.5 인치 서브 우퍼
연결성에는 WiFi, Bluetooth, 내장형 4K HDMI 2.0b 입력 (Dolby Vision, HDR10 및 HDCP 2.2 호환), HDMI (ARC) 출력 및 TV 오디오 용 광 입력이 포함됩니다.
포크의 독자적인 대화 기술 향상 기술, VoiceAdjust, 영화, 음악 및 스포츠를 포함한 조정 가능한 EQ 설정
선택적 벽 장착을위한 열쇠 구멍 내장
다른 브랜드가 보이스 어시스턴트에보다 보편적 인 접근 방식을 취하고있는 것을 감안할 때, Sonos One 은 Google과 Alexa 중 하나 를 선택할 수있게 해줄 것입니다. 고객이 아마존에 잠긴 사운드 바를 보냈는지 확인하는 것은 흥미로울 것입니다 알렉사.
커맨드 바는 2018 년 봄 299.95 달러에 출시 될 예정이며, 2018 년 캐나다, 영국, 독일, 호주에서 발표 될 예정이다.
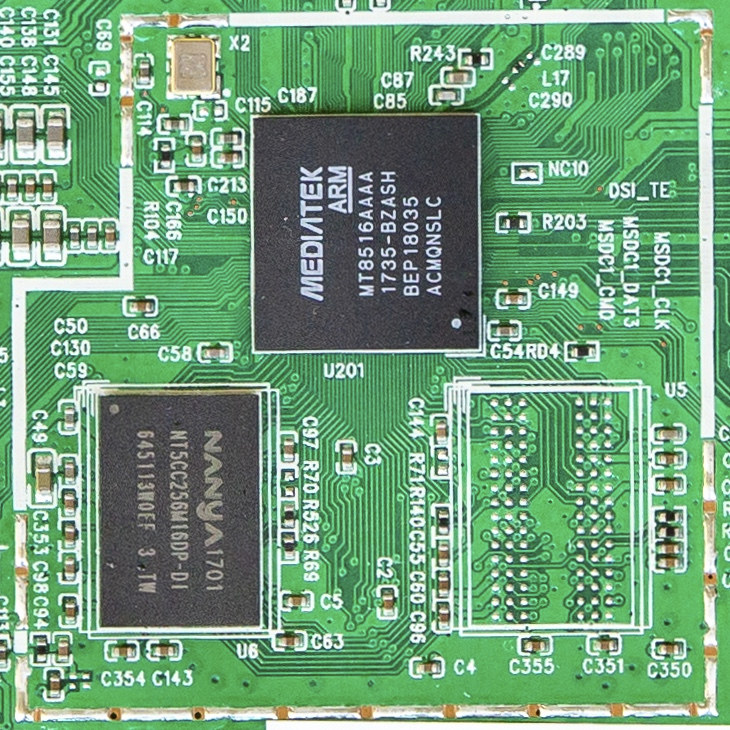
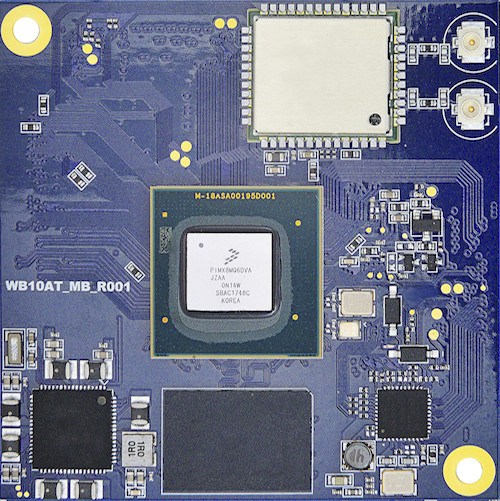
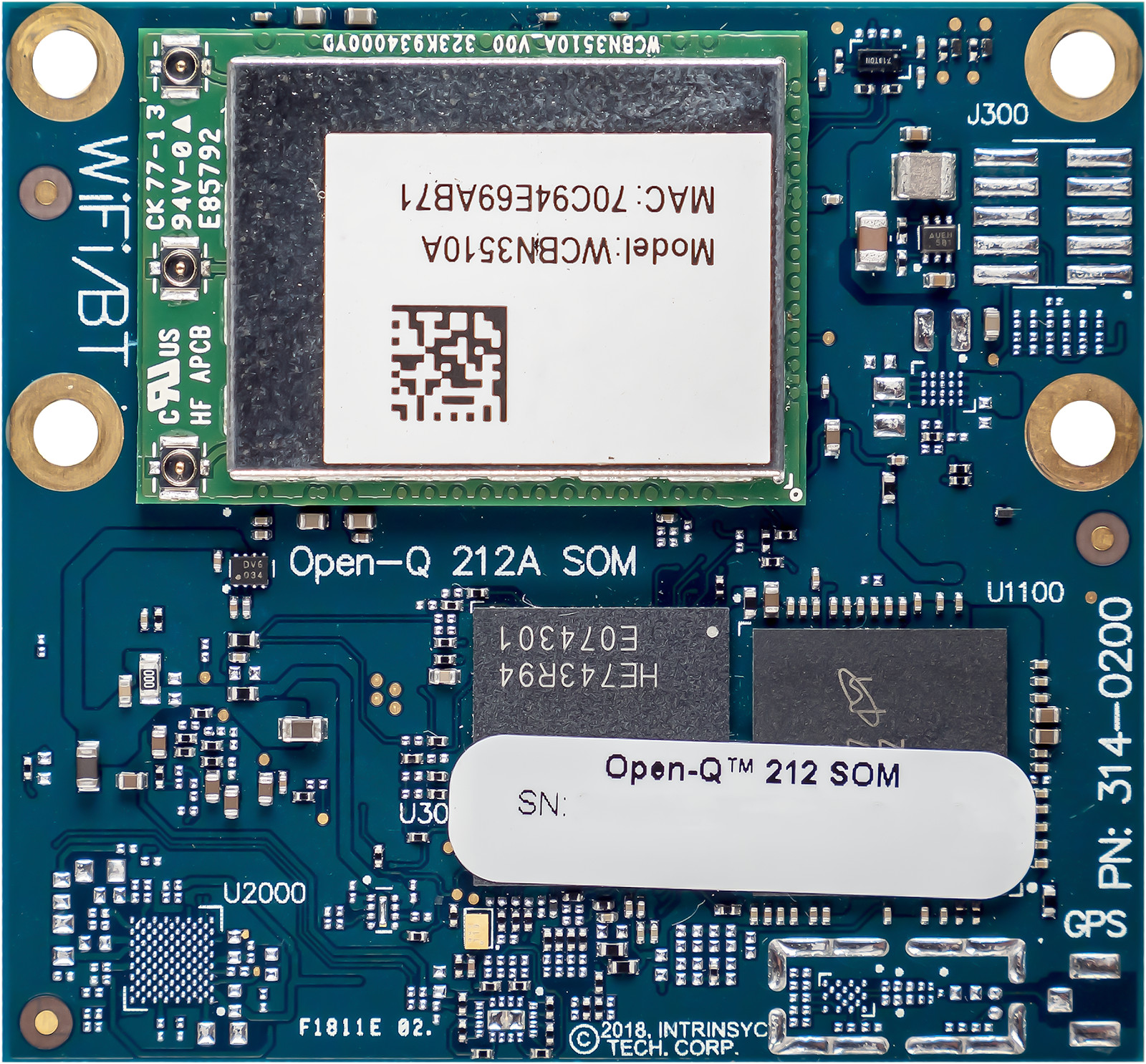
새로운 릴리스는 기반으로하는 새로운 시스템 - 온 - 모듈 (SOMS)에 대한 지원이 추가 NXP i.MX8M , 퀄컴 SDA212, 퀄컴 SDA624 및 미디어 텍 MT8516 의 SoC를. 이 모듈은 3 년 동안 보증 된 장기간 보증을 통해 프로덕션 용도로 인증되었으며이 SoM을위한 개발 하드웨어 및 참조 디자인은 다음 달에 제공 될 예정입니다.
Raspberry Pi 3 모델 B 및 NXP i.MX7D 보드 및 시스템 온 모듈은 계속 지원되지만 NXP i.MX6UL 장치에 대한 지원은 더 이상 사용되지 않습니다. 지원되는 플랫폼의 전체 목록은 하드웨어 페이지 를 확인하십시오 .
구글은 또한 기본적으로 모든 기기 에 자동 펌웨어 업데이트가 가능한 안드로이드의 강점을 지적했으며 , 옵션으로 (유료 읽기) 연장 지원을 통해 무료 안정성 픽스와 보안 패치를 3 년간 제공 할 예정이다. 소프트웨어 업데이트 지원에 대한 자세한 내용 은 프로그램 정책 을 참조하십시오 .
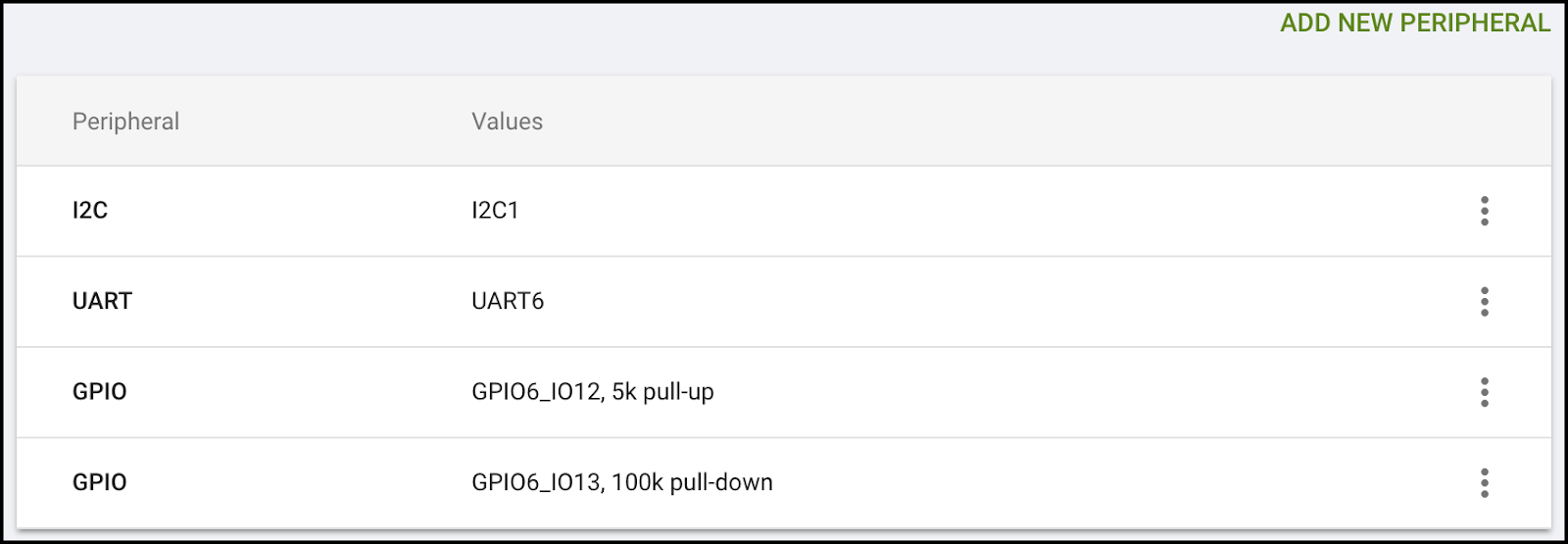
안드로이드 것들 콘솔은 이제 주변 I / O 연결 및 GPIO 풀업 / 풀다운 저항 및 I2C 및 UART 버스 속도 등의 장치 속성의 빌드 시간을 제어 할 수 있도록 하드웨어 주변 장치를 구성하는 새로운 인터페이스와 함께 제공됩니다.
확대하려면 클릭하십시오.
Android Things 콘솔을 사용하여 비영리 용도로 최대 100 개의 기기를 무료로 테스트 할 수 있지만 기업은 상용 제품의 한도를 제거하기 위해 Google과 배포 계약을 체결해야합니다.
Linaro Mobile Group (Android)과 Linaro Home Group (TV Boxes)의 Bero (Bernhard Rosenkränzer)와 그의 동료는 Linaro Connect의 해킹 룸에서 금요일 AOSP TV를 포함한 데모 금요일을 준비하고 있습니다 (대부분의 Android TV는 일부 최신 커널 버전으로 안드로이드 폰에 리눅스 커널을 업데이트) 7.1에서 실행되고 베로 또한 그가 구입 한 쌍둥이 PDA 놀라운 키보드 전화 (쌍둥이 자리 PDA 리눅스 지원에 내 비디오를 볼 부팅 멀티 리눅스에 대한 자신의 의견을 제공 여기 )
현재 Rosenkränzer는에서 작동 리나 , [3] 향상을 위해 최선을 다하고 조직 리눅스 에 ARM의 프로세서. 그는 또한 작동하는 데 사용 ROSA 연구소 , [4] 회사가 자신의 사용자 정의 브랜드 제공 맨드리바 리눅스를 러시아 정부에 대해. 이 작업의 일환으로 Ark Linux가 OpenMandriva 에 병합되었습니다 .
2012 년에는 Bionic (소프트웨어) 을 수정 하고 툴 체인을보다 잘 사용 하여 Linaro의 Android 빌드 속도를 높이는 작업에 참여했습니다 . [5]
2017 년 그는 AArch64 기반 데스크탑 및 노트북 컴퓨터의 프로토 타입 제작 및 데모 작업을 처음 으로 수행했습니다. [6]
Building Poplar Debian System Recovery Media From Source
The instructions that follow describe the process for creating a USB flash drive suitable for use in recovering a Poplar system from a "bricked" state. The USB memory stick must be at least 2 GB.
Follow the instructions in debian_build_instructions.md to create image suitable for use in a Poplar system, with the following exceptions:
Step 1: Build ARM Trusted Firmware components for recovery.
Add POPLAR_RECOVERY=1 to the end of the make command, as shown below:
cd${TOP}/arm-trusted-firmware
make distclean
make CROSS_COMPILE=${CROSS_64} all fip DEBUG=1 PLAT=poplar SPD=none \
BL33=${TOP}/u-boot/u-boot.bin POPLAR_RECOVERY=1
Step 2: Build "l-loader" for recovery
Add RECOVERY=1 to the end of the make command, as shown below:
cp ${TOP}/arm-trusted-firmware/build/poplar/debug/bl1.bin atf/
cp ${TOP}/arm-trusted-firmware/build/poplar/debug/fip.bin atf/
make clean
make CROSS_COMPILE=${CROSS_32} RECOVERY=1
Once you are done with Step 7 in the Build everything section, come back to this document.
To allow recovery of a Poplar board in a "bricked" state, prepare a USB flash drive.
Step 1: Identify your USB flash drive device
Insert the USB flash drive into your host system, and identify your USB device:
grep . /sys/class/block/sd?/device/model
If you recognize the model name as your USB flash device, then you know which "sd" device to use. Here is an example:
I had a Patriot Memory USB flash drive, and the device name I will want is "/dev/sdh" (based on "sdh" above). Record this name:
USBDISK=/dev/sdh # Make sure this is *your* device
The instructions that follow assume your USB flash drive needs to be formatted "from scratch." Once formatted, all that is required is to copy fastboot.bin to the first partition on the drive, and then properly eject the medium before removing the USB drive.
Step 2: Format the flash drive using MBR partitioning.
THIS IS VERY IMPORTANT. The following commands will COMPLETELY ERASE the contents of whatever device you specify here. So be sure USBDISK defines the flash device you intend to erase.
You will need superuser access. First, unmount anything mounted on that device:
sudo umount ${USBDISK}?
Next, clobber any existing partitioning information that might be found at the beginning of the device:
Finally, mount that partition and copy fastboot.bin into it. Once the partition has been unmounted and the device has been ejected, the USB stick can be removed.
(For a previously-formatted drive, simply inserting it will cause it be mounted automatically--normally under /media/...somewhere.)
Remove the USB flash drive from your host system.
De-brick a Poplar board in a "bricked" state
If a Poplar board is in a "bricked" state, it can be booted using the USB flash drive prepared above.
Step 1: Prepare the Poplar board for power-on
The Poplar board should be powered off. You should have a cable from the Poplar's micro USB based serial port to your host system so you can connect and observe activity on the serial port. For me, the board console shows up as /dev/ttyUSB0 when the USB cable is connected. The serial port runs at 115200 baud. I use this command to see what's on the console:
screen /dev/ttyUSB0 115200
Step 2: Insert the USB flash drive on the Poplar board
There are a total of 4 USB connectors on the Poplar board. Two are USB 2.0 ports, they are stacked on top of each other. Insert the USB memory stick into one of these two.
There is a "USB_BOOT" button on the board. It is one of two buttons on same side of the boards as the stacked USB 2.0 ports. To boot from the memory stick, this button needs to be depressed at power-on. You only need to hold it for about a second; keeping it down a bit longer does no harm.
Next you will be powering on the board, but you need to interrupt the automated boot process. To do this, be prepared to press a key, perhaps repeatedly, in the serial console window until you find the boot process has stopped.
Step 3: Boot the Poplar board from the USB flash drive
Power on the Poplar board (while pressing the USB_BOOT button), and interrupt its automated boot with a key press. This should lead to a poplar# prompt.
If the board does not power up properly, something is wrong with the images built or USB flash drive created. The console log should give some details regarding the error.
The following paragraphs provide some more information about the files found in the recovery_files directory.
fastboot.bin
When this file is placed in the first partition of a USB memory stick formatted with a FAT32 file system, that memory stick can be used to boot the Poplar board. This is useful if the board has become "bricked" and is otherwise unusable.
These are human-readable versions of installer scripts used by U-Boot. The top-level installer is install; it loads and executes the other install scripts. Each install script has a corresponding ".scr" file (e.g., install.scr), which is the file that U-Boot actually uses. install-layout installs the Master Boot Record and the Extended Boot Records required for partitions 5 and above. install-partitionX contains commands to install the contents of just one partition.
Each install*.scr file can be loaded into U-Boot and run. If the top-level install.scr is used, it will execute all the others. Otherwise, partial installs can be performed by, for example, loading and running install-layout.scr to re-write the boot records, or install-partition2.scr to re-write only partition 2.
mbr.bin.gz, ebr5.bin.gz, ebr6.bin.gz
These are the Master Boot Record and Extended Boot Records for partitions 5 and 6. They are compressed. They are normally loaded and flashed to eMMC using install-layout.
partition1.1-of-1.gz, partition3.1-of-4.gz, etc.
These are files that contain (parts of) the contents of the partitions. The contents of an entire partition can't fit entirely in memory, so large partitions are broken into pieces. Each piece is compressed. The install script for the partition takes care of uncompressing each part before writing it to eMMC.
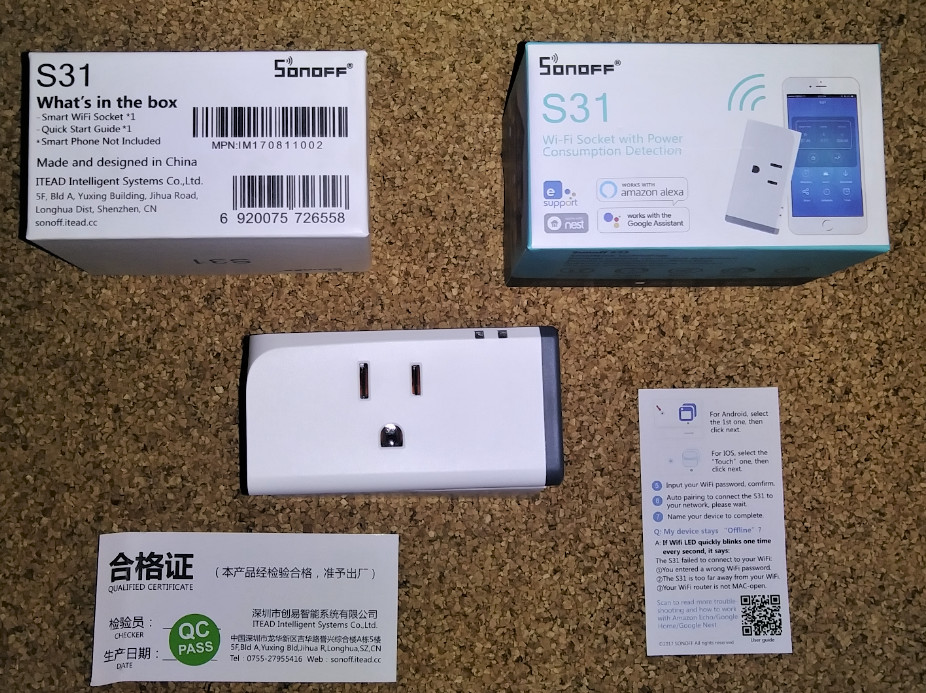
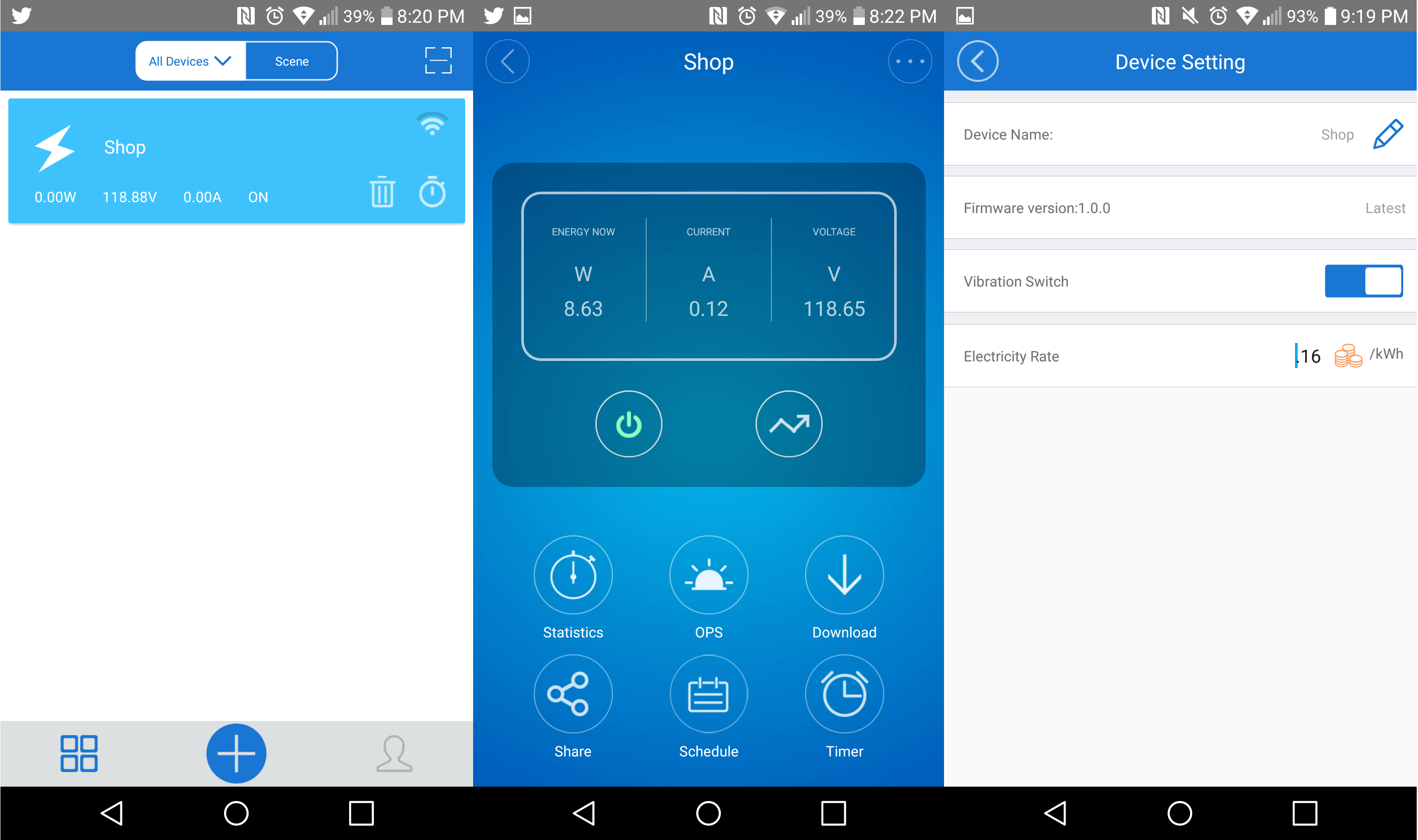
오늘 우리는 Sonoff S31을 보고 있습니다. 그것은 ITEAD Studio의 Sonoff 라인에있는 또 다른 장치입니다. Sonoff POW 와 마찬가지로 전원 사용량을 볼 수 있지만 S31에서는 기록 데이터를 최대 100 일간 유지할 수 있습니다. 이번에는 표준 펌웨어와 함께 사용하고 있으며 인기있는 MQTT Tasmota 펌웨어를 깜박 거리지 않을 것 입니다.
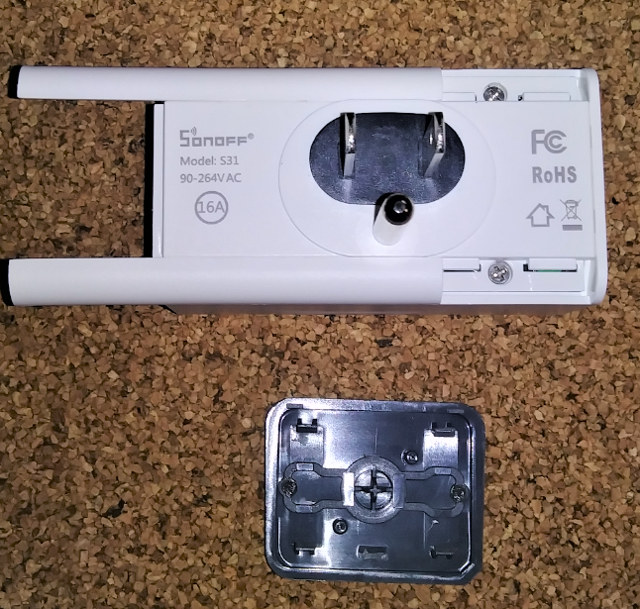
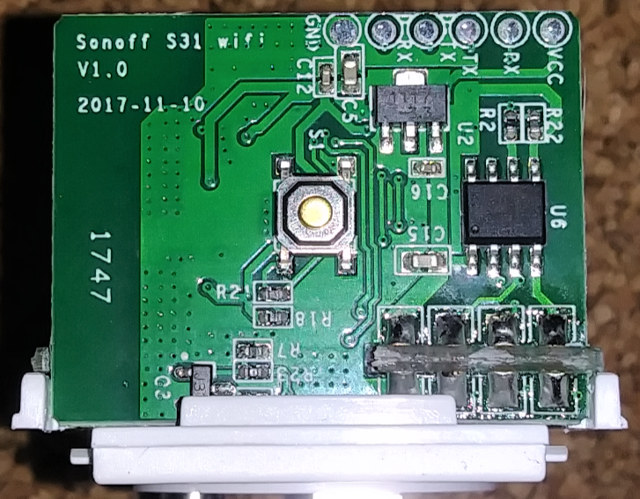
S31을 따로 떼어내는 것은 쉬운 일이지만, 그것을 깨뜨릴 것을 두려워서 완전히 분리하지 않았습니다. 전원 버튼을 왼쪽에서 튕기십시오. 그런 다음 2 개의 플라스틱 조각이 빠져 나옵니다.
eWeLink
홈 어시스턴트의 설치를 Google Assistant와 통합 했으므로 이번에는 그냥두고 보겠다고 생각했습니다. 저는 모션 센서의 자동 트리거링을 무시할 때 집에서 조명을 제어하기 위해 음성을 사용했습니다. (BTW는 1 년이 넘었고 모션 센서는 원래 배터리에 남아 있습니다 )
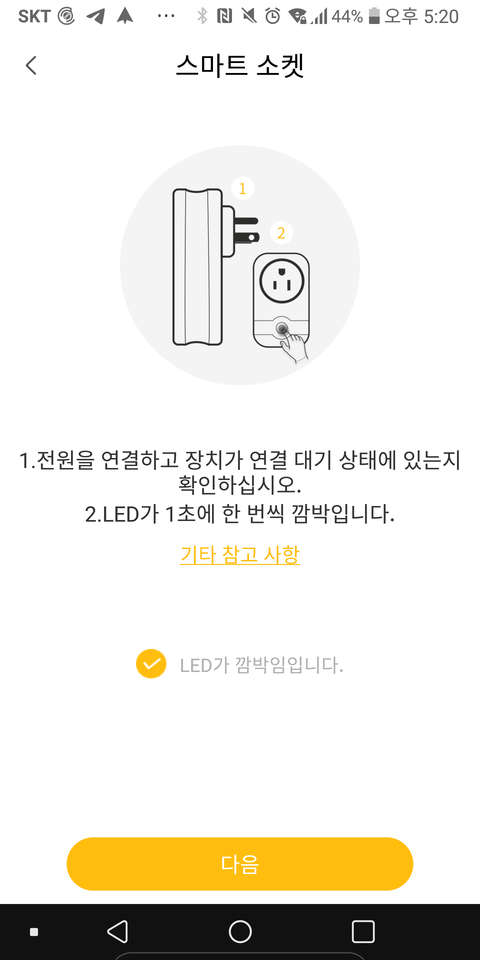
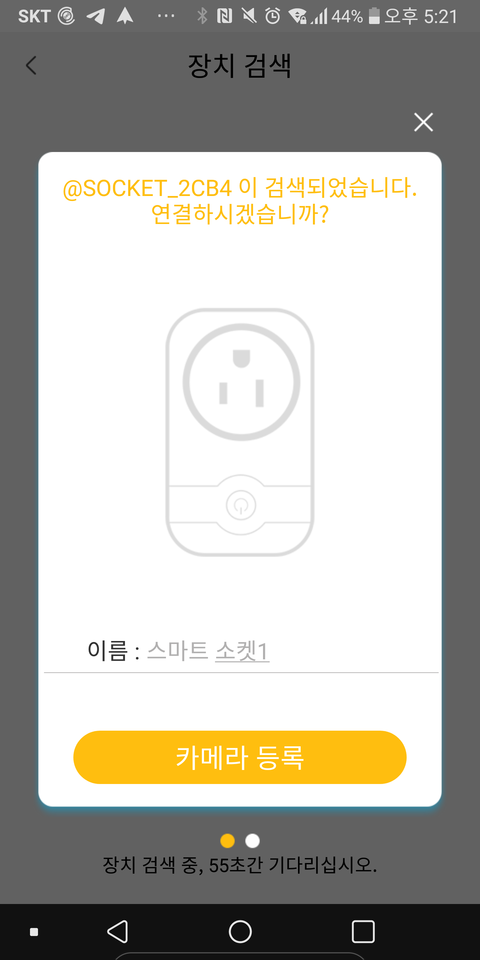
이미 eWeLink 계정이 있습니다. S31을 추가하는 것은 쉽고 효과적입니다. S31의 전원 단추를 7 초 동안 누르고 있으면 응용 프로그램이 장치를 찾습니다. S31은 핫스팟을 만들었고 매직으로 WiFi 자격 증명을 S31에 보내 네트워크에서 가져와 클라우드 서버와 통신합니다.
확대하려면 클릭하십시오.
확대하려면 클릭하십시오.
확대하려면 클릭하십시오.
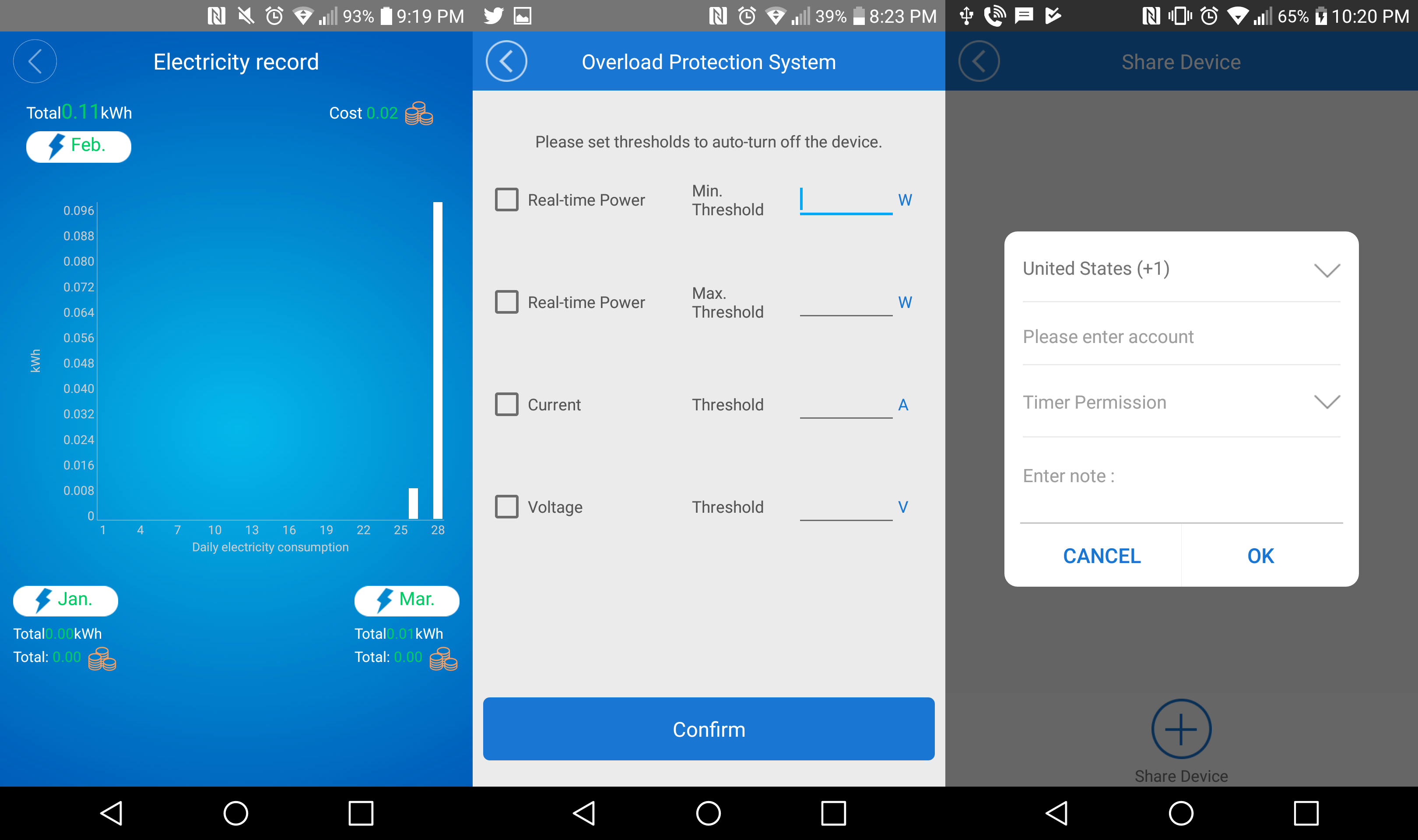
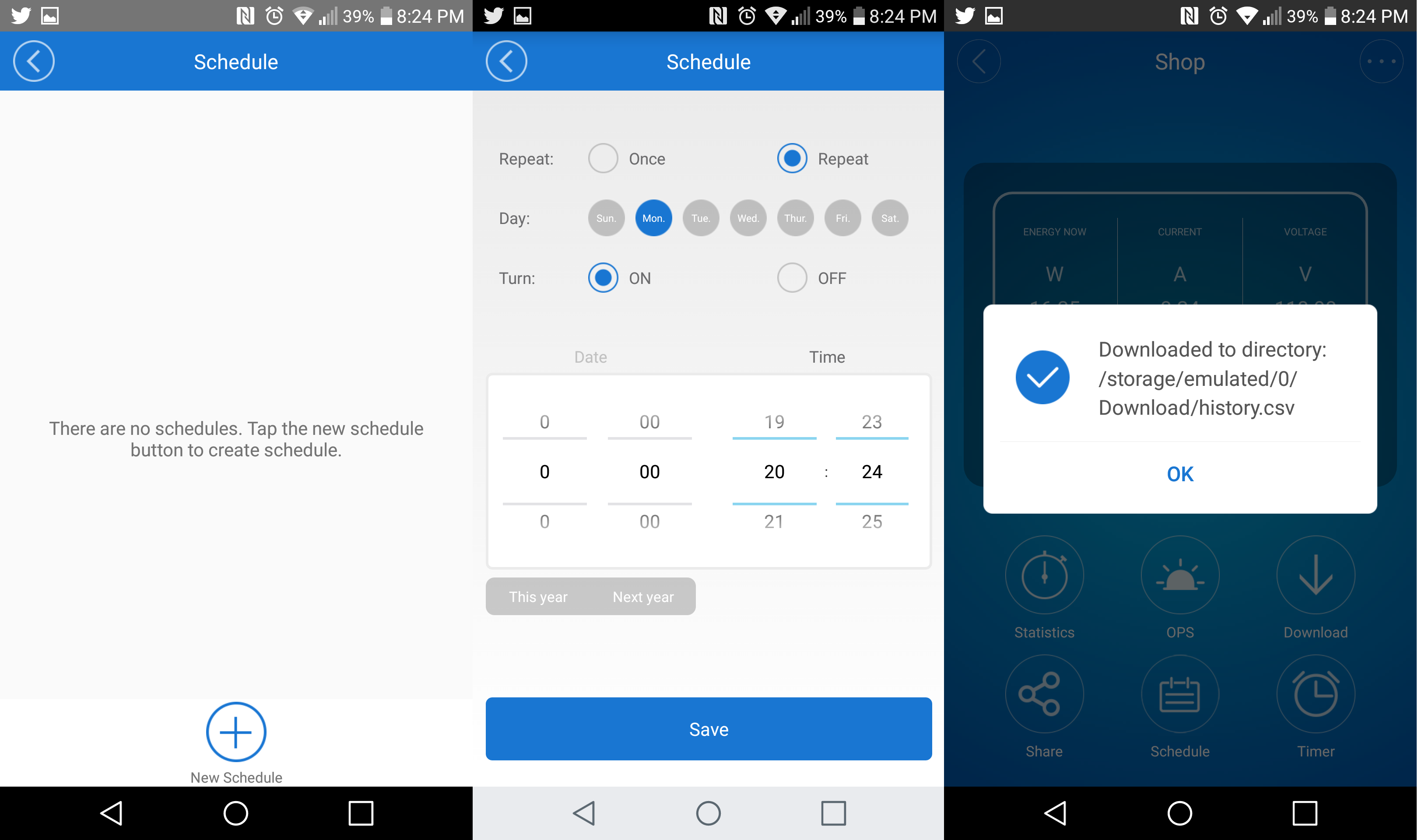
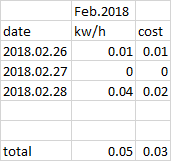
그것은 오래 동안이지만 이전 장치와 같은 모든 표준 설정이있는 것으로 보입니다. 몇 가지 새로운 항목이 있습니다. CSV 파일 및 스톱워치 유형 타이머를 다운로드하는 기능. CSV에 이상한 점 중 하나는 내 PC에 닿는 동안 다운로드하려면 history.csv 파일의 이름을 변경해야한다는 것 입니다. 나는 그것이 eWeLink 앱이 아니라 전화와 관련이 있다고 상상한다. 나는 kw / r 당 가격을 .16으로 입력했으며 여기에 예제 CSV 파일이 있습니다.
확대하려면 클릭하십시오.
스톱워치는 재부팅 및 앱 종료로 계속 유지됩니다. 특정 시간대에 전력 사용량을 수집하는 쉬운 방법입니다.
Google Assistant, Alexa, IFTTT
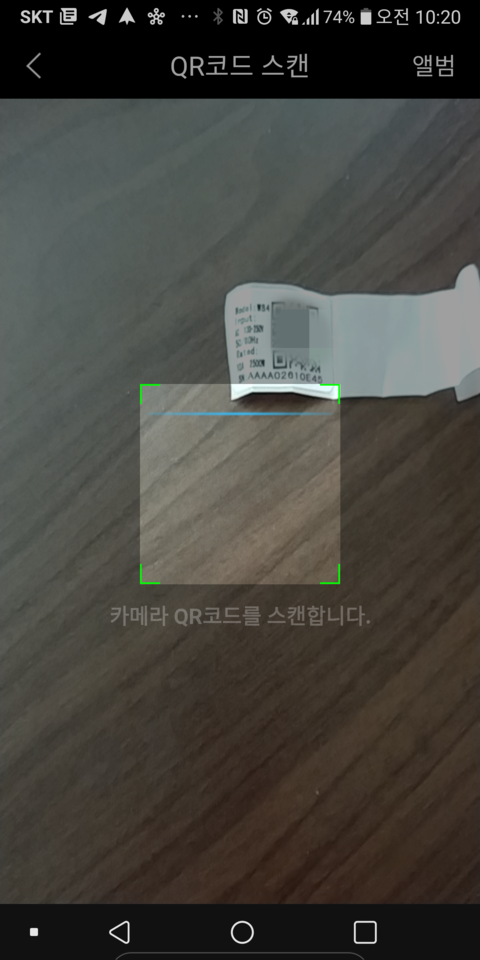
처음에는 패키지의 인서트에있는 qr 코드를 스캔하여 eWeLink 앱에서 가져온 지침을 따랐지만 지침은 날짜가 표시되었습니다. 나는이 지침을 따르고 내 전화기에 장애없이 추가했다. 핫 워드 OK 구글과 "가게 켜기"또는 "가게를 잘 껐다.
Alexa의 경우 eWeLink 기술을 활성화하고 내 계정에 연결했습니다. 그것은 S31을 찾았고 사건이 없었다. Google과 같은 키워드.
IFTTT는 아주 간단했습니다. 플러그인을 켜는 간단한 Android Assistant 구문을 만들었습니다. 나는 이것이 중복되지만 단지 기능을 테스트하기를 원한다는 것을 알고있다. 처음으로 일했습니다. IFTTT는 약 2 초 지연으로 가장 느린 응답을 보였습니다.
마무리
Sonone S31 ($ 16.90 + shipping) 발송에 대해 ITEAD에 감사드립니다 . 내가 Sonoff 라인에서 검토 한 것은 가장 소비자가 포장 한 장치입니다. 나는 S20와 S30을 검토하지 않았다. 스크류 터미널을 망칠 필요가 없습니다. 전원을 연결하고 네트워크에 연결하기 만하면됩니다. 하나의주의 사항은 전체 Sonoff 라인의 재고 펌웨어가 작동하기 위해 인터넷에 연결되어 있어야한다는 것입니다. MQTT를 상자에서 꺼내고 오프라인 모드 나 하이브리드 모드로 사용할 수있는 옵션이 있다면 좋겠습니다. 나는 자제적인 가정 자동화 군중들에게 유익 할 것이라고 생각한다.